We have already discussed how to extend the context size for modern Transformer architectures, but today we explore a different direction of this research. In the quest to handle longer sequences and larger datasets, Transformers are turning back to the classics: the memory mechanisms of RNNs, associative memory, and even continuous dynamical systems. From linear attention to Mamba, modern models are blending old and new ideas to bring forth a new paradigm of sequence modeling, and this paradigm is exactly what we discuss today.

Introduction: Explaining the Ideas
We have already discussed at length how Transformers have become the cornerstone of modern AI, powering everything from language models to image processing (see a previous post), and how the complexity of self-attention, which is by default quadratic in the input sequence length, leads to significant limitations when handling long contexts (see another post). Today, I’d like to continue this discussion and consider the direction of linear attention that has led to many exciting advances over the last year.
In the several years of writing this blog, I have learned that it is a futile attempt to try to stay on top of the latest news in artificial intelligence: every year, the rate of progress keeps growing, and you need to run faster and faster just to stay in one place. What I think still matters is explaining ideas, both new ideas that our field produces and old ideas that sometimes get incorporated into deep learning architectures in unexpected ways.
This is why I am especially excited about today’s post. Although much of it is rather technical, it allows me to talk about several important ideas that you might not have expected to encounter in deep learning:
- the idea of linear self-attention is based on reframing the self-attention formula with the kernel trick, a classical machine learning technique for efficiently learning nonlinear models with linear ones (e.g., SVMs);
- then, linear attention becomes intricately linked with associative memory, a classical idea suggested in the 1950s and applied to neural networks at least back in the 1980s in the works of the recent Nobel laureate John Hopfield, and fast weight programmers, an approach developed in the early 1990s;
- finally, Mamba is the culmination of a line of approaches based on state space models (SSM), which are actually continuous time dynamical systems discretized to neural architectures.
Taken together, these techniques represent a line of research… well, my first instinct here was to say “an emerging line of research” because most of these results are under two years old, and Mamba was introduced in December 2023. But in fact, this is an already pretty well established field, and who knows, maybe this is the next big thing in sequence modeling that can overcome some limitations of basic Transformers. Let us see what this field is about.
Linear Attention: The Kernel Trick in Reverse
As we have discussed many times (e.g., here and here), traditional Transformers use softmax-based attention, which computes attention weights over the entire input sequence:
![\[\mathbf{Z} = \mathrm{softmax}\left(\frac{1}{\sqrt{d_k}}\mathbf{Q}\mathbf{K}^\top\right)\mathbf{V}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-a4e517d8feb6937a30fdba7e3e1bd40f_l3.svg "Rendered by QuickLaTeX.com")
This formula means that  serves as the measure of similarity between a query
serves as the measure of similarity between a query  and a key
and a key  (see my previous post on Transformers if you need a reminder about where queries and keys come from here), and one important bottleneck of the Transformer architecture is that you have to compute the entire
(see my previous post on Transformers if you need a reminder about where queries and keys come from here), and one important bottleneck of the Transformer architecture is that you have to compute the entire  matrix of attention weights. This quadratic complexity
matrix of attention weights. This quadratic complexity  limits the input size, and we have discussed several different approaches to alleviating this problem in a previous post.
limits the input size, and we have discussed several different approaches to alleviating this problem in a previous post.
Linear attention addresses this problem with a clever use of the kernel trick, a classical idea that dates back to the 1960s (Aizerman et al., 1964). You may know it from support vector machines (SVM) and kernel methods in general (Schölkopf, Smola, 2001; Shawe-Taylor, Cristianini, 2004; Hofmann et al., 2008), but you also may not, so let me begin with a brief explanation.
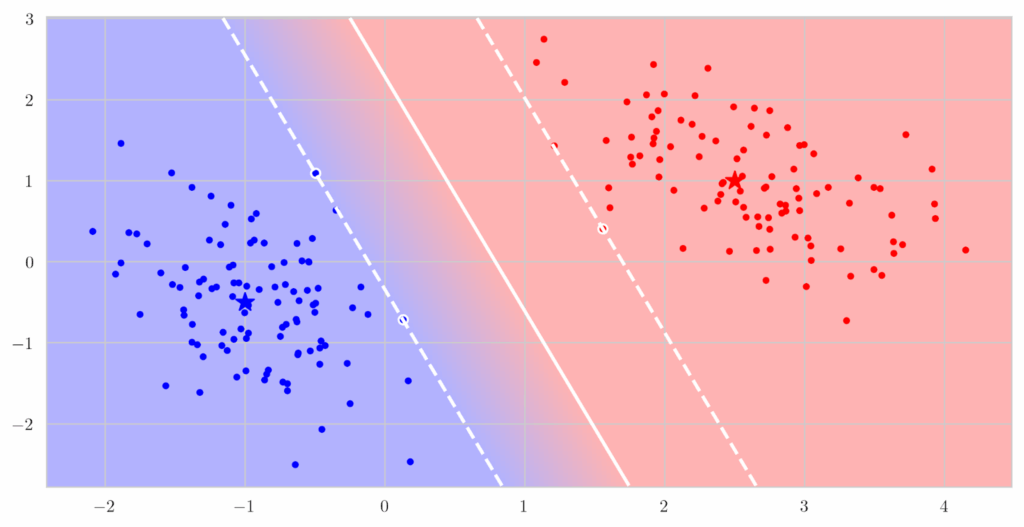
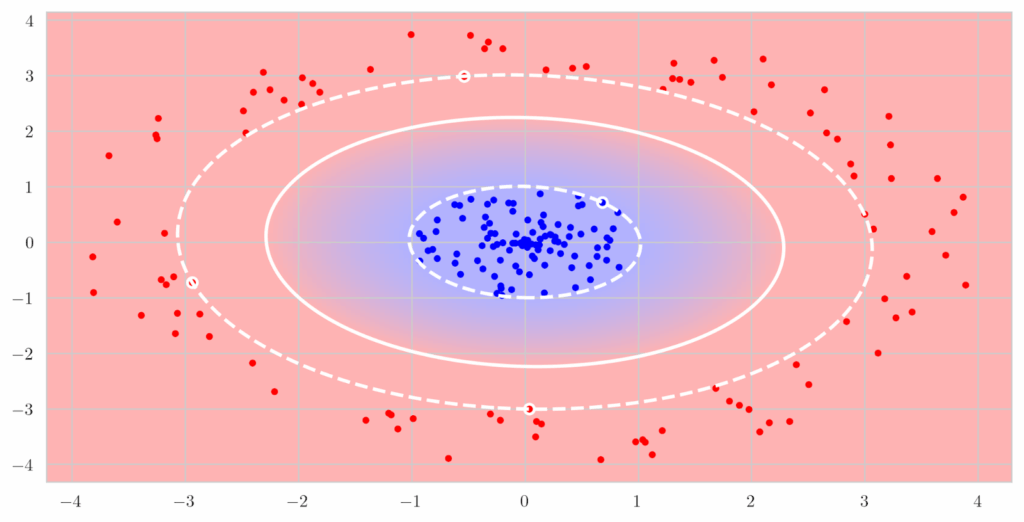
Suppose that you have a linear classifier, i.e., some great way to find a hyperplane that separates two (or more) sets of points, e.g., a support vector machine that finds the widest possible strip of empty space between two classes:
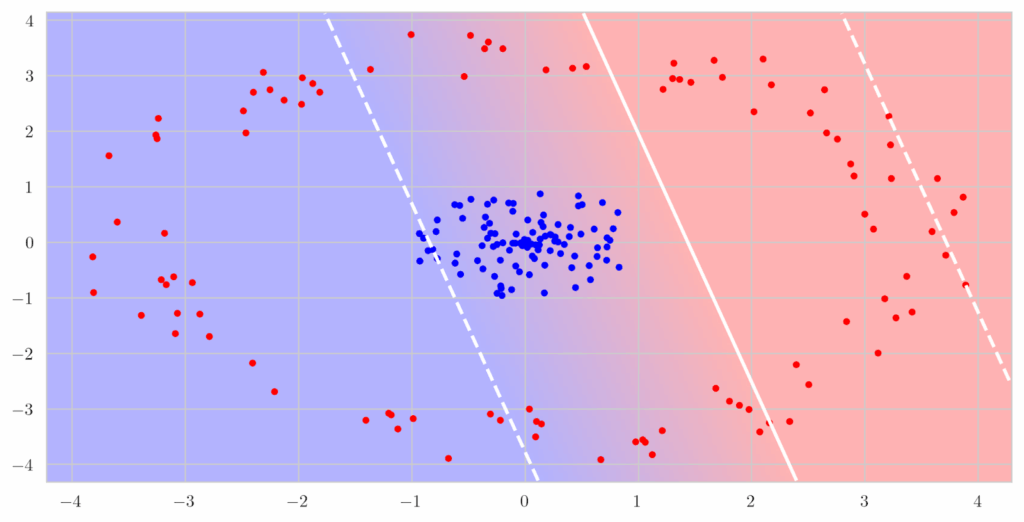
But in reality, it may happen that the classes are not linearly separable; for instance, what if the red points surround the blue points in a circle? In this case, there is no good linear decision surface, no hyperplane that works, and linear SVMs will fail too:
But it is also quite obvious what a good decision boundary would look like: it would be a quadratic surface. How can we fit a quadratic surface if we only have a linear classifier? Actually, conceptually it is quite easy: we extract quadratic features from the input vector and find the linear coefficients. In this case, if we need to separate two-dimensional points  , a quadratic surface in the general case looks like
, a quadratic surface in the general case looks like
![\[w_0 + w_1x_1 + w_2x_2+w_3x_1^2+w_4x_1x_2+w_5x_2^2 = 0,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-129a0be1e102e025681a1777ba0b3e3b_l3.svg "Rendered by QuickLaTeX.com")
so we need to go from a two-dimensional vector to a five-dimensional one by extracting quadratic features:
![\[\mathbf{x} = \left(\begin{matrix} x_1 & x_2\end{matrix}\right)^\top\quad\longrightarrow\quad \phi(\mathbf{x}) = \left(\begin{matrix} x_1 & x_2 & x_1^2 & x_1x_2 & x_2^2\end{matrix}\right)^\top.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-64244a2fddca46ef9f5e829657bfe37a_l3.svg "Rendered by QuickLaTeX.com")
In the five-dimensional space, the same formula is now a linear surface, and we can use SVMs to find the best separating hyperplane in  that will translate into the best separating quadratic surface in
that will translate into the best separating quadratic surface in  :
:
You can use any linear classifier here, and the only drawback is that we have had to move to a higher feature dimension. Unfortunately, this is a pretty severe problem: it may be okay to go from to but even if we only consider quadratic features as above it means that  will turn into
will turn into  , which is a much higher computational cost, and a higher degree polynomial will make things much worse.
, which is a much higher computational cost, and a higher degree polynomial will make things much worse.
This is where the kernel trick comes to the rescue: in SVMs and many other classifiers, you can rewrite the loss function in such a way that the only thing you have to be able to compute is the scalar product of two input vectors  and
and  (I will not go into the details of SVMs here, see, e.g., Cristianini, Shawe-Taylor, 2000). If this property holds, instead of directly going to the larger feature space we can look at what computing the scalar product means in that space and probably find a (nonlinear) function that will do the same thing in the smaller space. For quadratic features, if we change the feature extraction function to
(I will not go into the details of SVMs here, see, e.g., Cristianini, Shawe-Taylor, 2000). If this property holds, instead of directly going to the larger feature space we can look at what computing the scalar product means in that space and probably find a (nonlinear) function that will do the same thing in the smaller space. For quadratic features, if we change the feature extraction function to
![\[\phi(\mathbf{x}) = \left(\begin{matrix}\sqrt{2}x_1 & \sqrt{2}x_2 & x_1^2 & \sqrt{2}x_1x_2 & x_2^2\end{matrix}\right)^\top\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-274292b0dc8257fb19a25cc9754b7148_l3.svg "Rendered by QuickLaTeX.com")
(this is a linear transformation that does not meaningfully change our classification task), we can rewrite the scalar product as

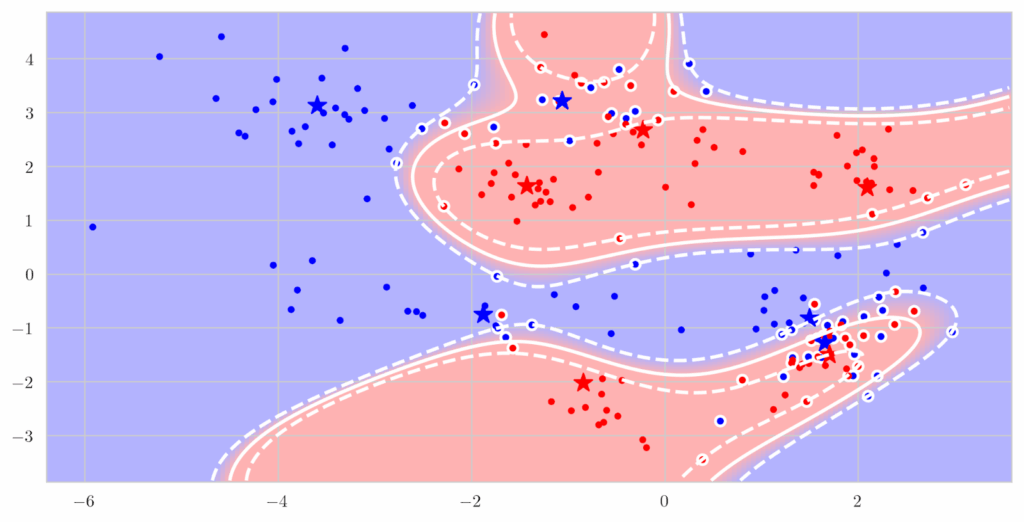
The result is called a kernel function  , and we can now replace scalar products in the higher-dimensional space with nonlinear functions in the original space. And if your classifier depends only on the scalar products, the dimension of the feature space is not involved at all any longer; you can even go to infinite-dimensional functional spaces, or extract local features and have SVMs produce excellent decision surfaces that follow the data locally:
, and we can now replace scalar products in the higher-dimensional space with nonlinear functions in the original space. And if your classifier depends only on the scalar products, the dimension of the feature space is not involved at all any longer; you can even go to infinite-dimensional functional spaces, or extract local features and have SVMs produce excellent decision surfaces that follow the data locally:
Well, linear attention is the same trick but in reverse: instead of using a nonlinear function to represent a high-dimensional dot product, let us use a feature extractor to approximate the nonlinear softmax kernel! We transform each key  and query
and query  using a feature map
using a feature map  , so that similarity between them can be computed as a dot product in feature space,
, so that similarity between them can be computed as a dot product in feature space,  ; let us say that maps the query and key space to
; let us say that maps the query and key space to  . So instead of computing each attention weight as the softmax
. So instead of computing each attention weight as the softmax
![\[\alpha_{ij} = \frac{\exp(\mathbf{q}_i^\top\mathbf{k}_j)}{\sum_{l=1}^L\exp(\mathbf{q}_i^\top\mathbf{k}_l)},\qquad\mathbf{z}_{i} = \sum_{j=1}^L\alpha_{ij}\mathbf{v}_j = \sum_{j=1}^L\frac{\exp(\mathbf{q}_i^\top\mathbf{k}_j)}{\sum_{l=1}^L\exp(\mathbf{q}_i^\top\mathbf{k}_l)}\mathbf{v}_j\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-9a9df668f5448d9c1fc72b089eabf5d6_l3.svg "Rendered by QuickLaTeX.com")
(I will omit the constant  for simplicity; we can assume that it is incorporated into the query and key vectors), we use a feature map, also normalizing the result to a convex combination:
for simplicity; we can assume that it is incorporated into the query and key vectors), we use a feature map, also normalizing the result to a convex combination:
![\[\alpha_{ij} = \frac{\phi(\mathbf{q}_i)^\top\phi(\mathbf{k}_j)}{\sum_{l=1}^L\phi(\mathbf{q}_i)^\top\phi(\mathbf{k}_l)}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-dadddb1af90599f6ecb5d9d3ed77c684_l3.svg "Rendered by QuickLaTeX.com")
This is much more convenient computationally because now we can rearrange the terms in the overall formula for  , and the quadratic complexity will disappear! Like this:
, and the quadratic complexity will disappear! Like this:
![\[\mathbf{z}_i = \sum_{j=1}^L\alpha_{ij}\mathbf{v}_j = \sum_{j=1}^L\frac{\phi(\mathbf{k}_j)^\top\phi(\mathbf{q}_i)}{\sum_{l=1}^L\phi(\mathbf{k}_l)^\top\phi(\mathbf{q}_i)}\mathbf{v}_j = \frac{\left(\sum_{j=1}^L\mathbf{v}_j\phi(\mathbf{k}_j)^\top\right)\phi(\mathbf{q}_i)}{\left(\sum_{l=1}^L\phi(\mathbf{k}_l)^\top\right)\phi(\mathbf{q}_i)}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-15f0e78c2025965bc07dfd1948057f92_l3.svg "Rendered by QuickLaTeX.com")
Now instead of computing the matrix of attention weights we can first multiply  by
by  (getting the brackets in the numerator above), which is a multiplication of
(getting the brackets in the numerator above), which is a multiplication of  and
and  matrices, and then reuse it for every query, multiplying the
matrices, and then reuse it for every query, multiplying the  matrix
matrix  by the result:
by the result:
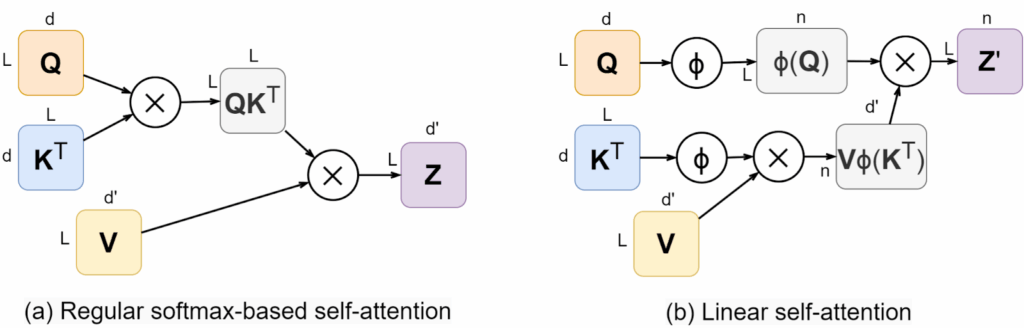
Note that the result has dimension  rather than
rather than  , and also note that I put
, and also note that I put  as the output in the (b) part of the figure (on the top right) because it is only the numerator of the fraction above, but the denominator is also obviously not quadratic: we can first add up
as the output in the (b) part of the figure (on the top right) because it is only the numerator of the fraction above, but the denominator is also obviously not quadratic: we can first add up  and then multiply by each query. Let us also simplify the formula above by denoting
and then multiply by each query. Let us also simplify the formula above by denoting
![\[\mathbf{S} = \sum\nolimits_{j=1}^L\mathbf{v}_j\phi(\mathbf{k}_j)^\top,\quad \mathbf{S}\in\RR^{d\times n},\qquad \mathbf{u} = \sum\nolimits_{l=1}^L\phi(\mathbf{k}_l),\quad\mathbf{u}\in\RR^n,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-5e0de1e4d0efd5968ac933be8275f4d1_l3.svg "Rendered by QuickLaTeX.com")
so we get a simple formula for linear attention as
![\[\mathbf{z}_i = \frac{\mathbf{S}\phi(\mathbf{q}_i)}{\mathbf{u}^\top \phi(\mathbf{q}_i)}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-ebbd517c4e6792817c0b79ed8651b5fd_l3.svg "Rendered by QuickLaTeX.com")
This is exactly the idea of linear attention as proposed by Katharopoulos et al. (2020). But there is one more important step.
Causal Linear Attention: Transformers are RNNs?
We know that Transformers are often applied autoregressively. Any language model, e.g., from the GPT family (recall our post on Transformers), is an autoregressive model that applies self-attention to the same sequence gradually, step by step, and causally: an output at position  depends only on inputs in positions
depends only on inputs in positions  .
.
To train an autoregressive Transformer, you don’t have to rerun the whole model for every token, like you do for generation. Instead, autoregressive Transformers use causal self-attention, a special modification where the entire sequence is input at once, but the attention weights to future tokens are automatically set to zero. This means that we get the same self-attention formula but with sums only going up to the current -th token:
![\[\alpha_{tj} = \frac{\exp(\mathbf{q}_t^\top\mathbf{k}_j)}{\sum_{l=1}^t\exp(\mathbf{q}_t^\top\mathbf{k}_l)},\qquad\mathbf{z}_{t} = \sum_{j=1}^t\alpha_{tj}\mathbf{v}_j = \sum_{j=1}^t\frac{\exp(\mathbf{q}_t^\top\mathbf{k}_j)}{\sum_{l=1}^t\exp(\mathbf{q}_t^\top\mathbf{k}_l)}\mathbf{v}_j.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-80ecfbd1c5e85c705a22d5be3c0eddf3_l3.svg "Rendered by QuickLaTeX.com")
Passing to a scalar product with feature extractor as above, we get
![\[\mathbf{z}_t = \frac{\mathbf{S}_t\phi(\mathbf{q}_t)}{\mathbf{u}_t^\top \phi(\mathbf{q}_t)},\quad\text{where}\quad\mathbf{S}_t = \sum\nolimits_{j=1}^t\mathbf{v}_j\phi(\mathbf{k}_j)^\top,\quad \mathbf{u}_t = \sum\nolimits_{l=1}^t\phi(\mathbf{k}_l).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-c52e2ef7ba7e78daec4f871e7fa2c7cd_l3.svg "Rendered by QuickLaTeX.com")
It is becoming more and more clear where this is going: since  and
and  are just cumulative sums, we don’t have to recompute them from scratch on inference; instead, we can update them from previous values as
are just cumulative sums, we don’t have to recompute them from scratch on inference; instead, we can update them from previous values as
![\[\mathbf{S}_t=\mathbf{S}_{t-1}+\mathbf{v}_t\phi(\mathbf{k}_t)^\top,\qquad \mathbf{u}_t=\mathbf{u}_{t-1} + \phi(\mathbf{k}_t).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-015abf86f742fd75b60c804773d3049f_l3.svg "Rendered by QuickLaTeX.com")
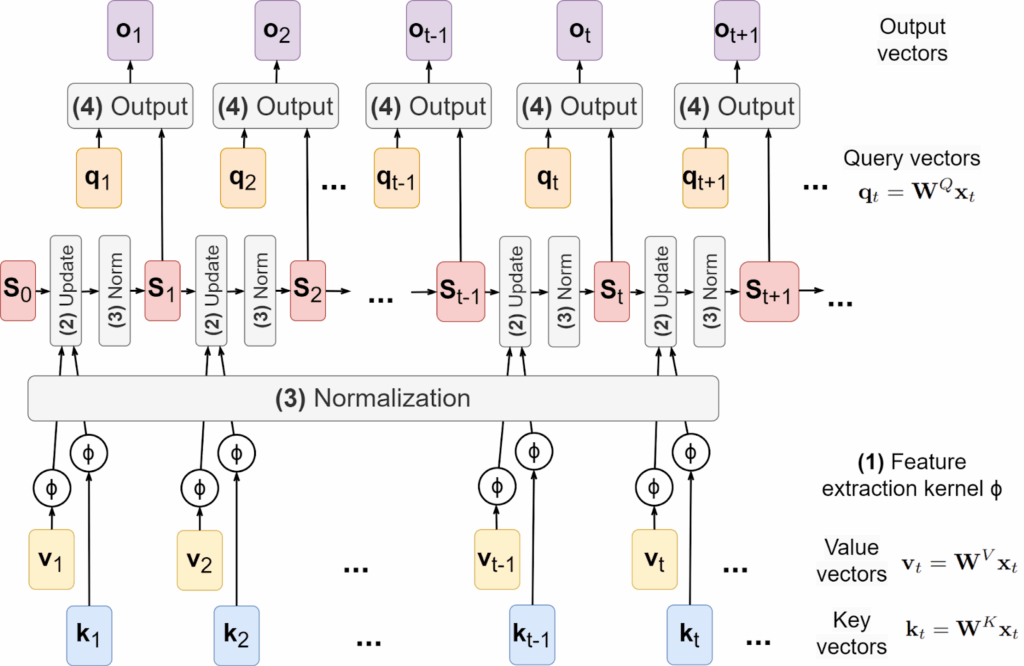
Katharopoulos et al. (2020) also show that the gradients can be computed incrementally from timestep to timestep; this is a straightforward calculation so I will not repeat it here. As a result, they come to the conclusion that their linear Transformer is… essentially a recurrent neural network (RNN)! This “RNN” has a hidden state that consists of two different components, a matrix state and a normalizer state ; we have derived the formulas for how to update this recurrence above, and we also know the formula for the output of this recurrent layer:
![\[\mathbf{o}_t=\frac{\mathbf{S}_{t}\phi(\mathbf{q}_t)}{\mathbf{u}_t^\top\phi(\mathbf{q}_t)}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-1ce81b433b374dfd7adce292ede771cc_l3.svg "Rendered by QuickLaTeX.com")
In practice, one often removes the normalizing denominator since it can lead to numerical instabilities (Schlag et al., 2021; Mao, 2022), and the feature extractor is commonly taken to be  , so the formulas simplify to
, so the formulas simplify to
![\[\mathbf{S}_t=\mathbf{S}_{t-1}+\mathbf{v}_t\mathbf{k}_t^\top,\qquad \mathbf{o}_t=\mathbf{S}_t\mathbf{q}_t.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-a2947050f6a96bdc8a7b797dea226b8b_l3.svg "Rendered by QuickLaTeX.com")
But isn’t that a little too simple? Linear attention uses the kernel trick to approximate the softmax mechanism efficiently, enabling Transformers to handle longer sequences. However, this shift from quadratic to linear complexity raises questions about the fundamental role and meaning of attention: how should models store and retrieve relevant information efficiently? In the next section, we discuss associative memory, a classical concept in neural networks, which in this case turns out to be an important point of view on this question. In particular, it shares a similar goal of learning to store patterns and retrieving them based on input queries. By revisiting associative memory, we can better understand the underlying mechanisms of linear attention and their limitations.
Fast Weight Programmers and Associative Memory
We discuss several approaches in this section but mostly follow Schlag et al. (2021) who provide us with some key intuition about linear Transformers. They note that linear Transformers are almost entirely equivalent to an architecture called Fast Weight Programmers (FWPs), developed by Jurgen Schmidhuber (yes, this was his idea too!) in the early 1990s (Schmidhuber, 1992; 1993).
FWPs come from the basic intuition that the weights in standard neural networks remain fixed after training; activations change depending on the input, but the weights themselves are frozen. This is a bad thing for what is known as the binding problem (Greff et al., 2020): a neural network has no easy way to bind variables, define symbols, and thus construct compositional internal representations and perform symbolic reasoning that plays a key role in human cognition (Whitehead, 1927; Spelke, Kinzler, 2007; Johnson-Laird, 2010).
One possible solution for the binding problem would be to have two kinds of weights in a neural network: slow weights that are fixed after training as usual and fast weights that are context-dependent and can change on inference. As Greff et al. (2020) put it, “the slow net learns to program its fast net”. In an FWP (Schmidhuber, 1991; 1992), the slow network learns to adjust fast weights as follows: for a sequence of inputs  ,
,  ,
,

where  and
and  are slow weights and
are slow weights and  are fast weights. In essence, fast weights play the role of an RNN’s hidden state and the formulas above define the recurrence (Schmidhuber himself rephrased this idea in recurrent terms a year later, in 1993).But note the uncanny resemblance of this update rule and Transformer’s self-attention: Schmidhuber’s FWPs also make use of the outer produce
are fast weights. In essence, fast weights play the role of an RNN’s hidden state and the formulas above define the recurrence (Schmidhuber himself rephrased this idea in recurrent terms a year later, in 1993).But note the uncanny resemblance of this update rule and Transformer’s self-attention: Schmidhuber’s FWPs also make use of the outer produce  to update the hidden state! FWPs create a short-term associative memory where keys are associated with values in a matrix form, the write operation is implemented by adding the outer product, and the readout is represented by matrix multiplication.
to update the hidden state! FWPs create a short-term associative memory where keys are associated with values in a matrix form, the write operation is implemented by adding the outer product, and the readout is represented by matrix multiplication.
You can see how this resemblance becomes a formal equivalence when we move to linear attention: if we set the activation function σ above to identity, we get exactly the update rule and readout of simplified linear attention:
Normalization (the vector  above) was absent from the FWPs of the 1990s but it also a straightforward idea in this formulation: whenever you have a “memory” that accumulated a big sum of values along the input sequence, it is natural to try and renormalize the sum to keep it at the same scale.
above) was absent from the FWPs of the 1990s but it also a straightforward idea in this formulation: whenever you have a “memory” that accumulated a big sum of values along the input sequence, it is natural to try and renormalize the sum to keep it at the same scale.
To make further improvements, Schlag et al. (2021) also go back to the original motivation for the whole thing: fit information into the hidden state matrix  . The relation to fast weight programmers also brings back the original goal of this transformation: we store vectors in the matrix
. The relation to fast weight programmers also brings back the original goal of this transformation: we store vectors in the matrix  , and then retrieve this information via matrix multiplication. Let us discuss this in more detail.
, and then retrieve this information via matrix multiplication. Let us discuss this in more detail.
The idea of storing information in this way is known as associative memory, a classical concept in artificial intelligence (see, e.g., Haykin, 2011) which is a natural generalization of, well, just storing things in memory:
- in regular memory, you have d slots where you can store something (say, a vector), and retrieval from the memory can be thought of as multiplying the memory matrix by a vector; storing something new in regular memory can be thought of as adding a rank one matrix with the new vector in its proper slot;
- in associative memory, you have a matrix
 that stores vector associations as projections to some orthogonal basis; to store a new association
that stores vector associations as projections to some orthogonal basis; to store a new association  in the matrix , you need to choose a key vector that’s orthogonal to previous key vectors and update
in the matrix , you need to choose a key vector that’s orthogonal to previous key vectors and update  ; to retrieve the association, you do a projection by multiplying
; to retrieve the association, you do a projection by multiplying  .
.
Associative memory is another one of those ideas that were motivated by neurobiology and date back to early studies of the brain. In 1949, Donald Hebb introduced his famous learning principle, often summarized as “neurons that fire together, wire together” (Hebb, 1949); in other words, associations between neurons, reflected in synapse weights, grow stronger if neurons get activated at the same time. Unlike gradient descent, Hebbian learning is actually possible with biological neurons, and Hebb’s work in many ways remains relevant in neurobiology today (his theory also made provisions for, e.g., spike-timing-dependent plasticity that was not known in the 1940s).
It soon became clear that associative memory could be used as a kind of machine learning model. Early attempts at such models started in the 1950s (Taylor, 1956), but two ideas based on associative memory found wide success later:
- self-organizing maps (SOM), or Kohonen networks, developed by Teuvo Kohonen in the 1970s (Kohonen, 1974), were at some point among the most popular unsupervised learning methods, performing representation learning by adjusting the weights towards neurons that are already best matches for the input, a process known as competitive learning (Grossberg, 1987; Kohonen, 1988);
- Hopfield networks, developed by John Hopfield in the 1980s (Hopfield, 1982; 1984), store patterns in minima of energy landscapes of neural networks and retrieve them by evolving towards these local minima, which means that retrieval is done by association from incomplete data; there has been a lot of research on Hopfield networks (Krotov, Hopfield, 2016; 2020; Demircigil et al., 2017; Ramsauer et al., 2020), and recently John Hopfield shared the 2024 Nobel Prize in Physics with Geoffrey Hinton for his work in neural networks, but this is a story for another time.
Let us walk through an example of how associative memory works. We will work in 2D so that we can plot everything, so we begin with a  zero matrix . Suppose that we want to store two vectors in that matrix,
zero matrix . Suppose that we want to store two vectors in that matrix,
![\[\mathbf{x}_1 = \left(\begin{matrix}2 \\ 3\end{matrix}\right),\qquad\mathbf{x}_2 = \left(\begin{matrix}-2 \\ 1\end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-addab418e6c08842afb0d850d1968bc0_l3.svg "Rendered by QuickLaTeX.com")
If we were just storing them in the matrix column by column, it would be equivalent to using keys aligned with coordinate axes:
![\[\mathbf{A}_1 = \mathbf{x}_1 \left(\begin{matrix}1 \\ 0\end{matrix}\right)^\top = \left(\begin{matrix} 2 & 0 \\ 3 & 0\end{matrix}\right),\qquad \mathbf{A}_2 = \mathbf{A}_1 + \mathbf{x}_2 \left(\begin{matrix}0 \\ 1\end{matrix}\right)^\top = \left(\begin{matrix} 2 & -2 \\ 3 & 1\end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-f7806c0586980994540311baa09b4b96_l3.svg "Rendered by QuickLaTeX.com")
Reading from this memory is simply reading the columns, or, equivalently, multiplying by (1 0) and (0 1) key vectors. But we can take any other set of two orthogonal key vectors, say (let’s keep them at unit length to avoid renormalization):
![\[\mathbf{k}_1 = \frac{1}{\sqrt{2}} \left(\begin{matrix}1 \\ 1\end{matrix}\right),\qquad\mathbf{k}_2 = \frac{1}{\sqrt{2}} \left(\begin{matrix}-1 \\ 1\end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-0006ba9d50b21c29602acb41816218e9_l3.svg "Rendered by QuickLaTeX.com")
In this case, we get
![\[\mathbf{A}_1 = \mathbf{x}_1\mathbf{k}_1^\top = \frac{1}{\sqrt{2}} \left(\begin{matrix}2 & 2 \\ 3 & 3\end{matrix}\right),\quad \mathbf{A}_2 = \mathbf{A}_1 + \mathbf{x}_2\mathbf{k}_2^\top = \mathbf{A}_1 + \frac{1}{\sqrt{2}} \left(\begin{matrix}2 & -2 \\ -1 & 1\end{matrix}\right) = \frac{1}{\sqrt{2}} \left(\begin{matrix} 4 & 0 \\ 2 & 4\end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-2a4f098ad6bdd706afdf35c3efd97f9a_l3.svg "Rendered by QuickLaTeX.com")
Reading from this matrix still works fine:
![\[\mathbf{A}_2\mathbf{k}_1 = \frac{1}{\sqrt{2}} \left(\begin{matrix}4 & 0 \\ 2 & 4\end{matrix}\right)\cdot\frac{1}{\sqrt{2}} \left(\begin{matrix}1 \\ 1\end{matrix}\right) = \left(\begin{matrix} 2 \\ 3 \end{matrix}\right),\quad\mathbf{A}_2\mathbf{k}_2 = \frac{1}{\sqrt{2}} \left(\begin{matrix}4 & 0 \\ 2 & 4\end{matrix}\right)\cdot\frac{1}{\sqrt{2}} \left(\begin{matrix} -1 \\ 1\end{matrix}\right) = \left(\begin{matrix}-2 \\ 1\end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-01f645188bb0c365c9bd725c490dd7ed_l3.svg "Rendered by QuickLaTeX.com")
But if you try to add a third vector to the same associative memory with a third key, which is now inevitably non-orthogonal with the first two, say,
![\[\mathbf{x}_3 = \left(\begin{matrix}1 \\ 2\end{matrix}\right),\quad \mathbf{k}_3 = \frac{1}{\sqrt{5}} \left(\begin{matrix} 2 \\ -1\end{matrix}\right), \quad \mathbf{A}_3 =\mathbf{A}_2 + \mathbf{x}_3\mathbf{k}_3^\top = \frac{1}{\sqrt{2}} \left(\begin{matrix}4 & 0 \\ 2 & 4\end{matrix}\right)+\frac{1}{\sqrt{5}} \left(\begin{matrix}2 & -1 \\ 4 & -2\end{matrix}\right),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-8ac915a905e643ea285ab42c2b86be96_l3.svg "Rendered by QuickLaTeX.com")
retrieval results will become corrupted, both for the original vectors and for the new vector  :
:
![\[\mathbf{x}'_1 = \mathbf{A}_3\mathbf{k}_1 = \mat{2 + \frac{1}{\sqrt{10}} \ 3 + \frac{2}{\sqrt{10}} },\quad\mathbf{x}'_2 = \mathbf{A}_3\mathbf{k}_2 = \left(\begin{matrix}-2 - \frac{3}{\sqrt{10}} \\ 1 - \frac{6}{\sqrt{10}} \end{matrix}\right),\quad\mathbf{x}'_3 = \mathbf{A}_3\mathbf{k}_3 = \left(\begin{matrix}\frac{8}{\sqrt{10}}+1 \\ 2 \end{matrix}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-70e9e5479a8465c67d1d364c485bd724_l3.svg "Rendered by QuickLaTeX.com")
Geometrically this effect can be illustrated as below; we can find two orthogonal vectors for the first two keys (on the left in the figure) but the third one breaks perfect retrieval (retrieved vectors are shown with dashed lines on the right):
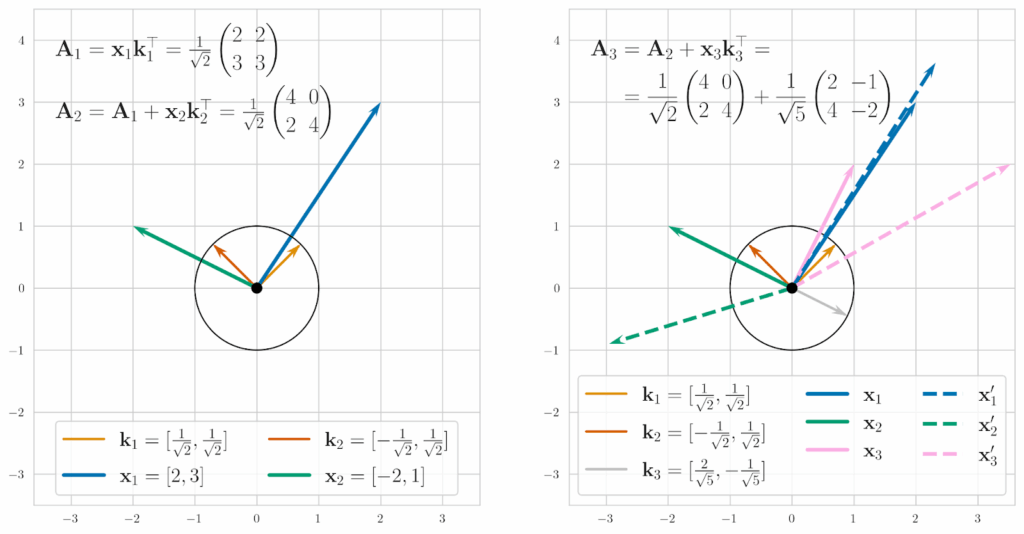
So far, it doesn’t sound like much of an improvement: we could just store vectors row by row and have the exact same number of them fit. The point of associative memory lies in its robustness to the orthogonality requirement: if the keys are nearly orthogonal you will retrieve vectors that are still quite similar to the originals, even if the keys are not orthogonal exactly. And this means that we can fit more keys than the matrix dimension, with imperfect but still reasonable recall!
This is hard to illustrate with a two-dimensional picture but in high dimensions you can use sparse keys that are all nearly orthogonal even though they intersect a little. For example, if  , and you use binary keys that all look like a vector with
, and you use binary keys that all look like a vector with  ones and 90 zeros (divided by
ones and 90 zeros (divided by  , of course), two keys that have zero ones in common are perfectly orthogonal with zero dot product, but the keys that have only
, of course), two keys that have zero ones in common are perfectly orthogonal with zero dot product, but the keys that have only  one in common have the dot product of 1/10, which may be sufficient for retrieval in practice.
one in common have the dot product of 1/10, which may be sufficient for retrieval in practice.
Finding out how many such keys can exist for given d, k, and m is a well known problem from a completely separate field of study, called the theory of block designs, a part of the theory of error-correcting codes. This is essentially a coding question: how many codewords with at most a given intersection can you fit for a given dimension, given codeword weight (number of ones), and given intersection constraint? I will not go into error-correcting codes and refer to, e.g., (Assmus, Key, 1992; Huffman, Press, 2003), but the main relevant results here are the Hamming bound that is proven by counting and the more complicated Johnson bound. The Hamming bound says that without restrictions on the weight, for given d and m you can fit about
![\[A_2(d, m) \le \frac{2^d}{\sum_{l=0}^{\lfloor(m-1)/2\rfloor}{d\choose l}}\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-20e1dc3909c5feecc596a50cbf4af4b5_l3.svg "Rendered by QuickLaTeX.com")
binary keys. We are interested in large values of m, where you can get a good approximation for the denominator via the entropy of the relative distance:
![\[A_2(d, m) \le 2^{d\left(1-H(p)\right)+o(d)},\quad H(p)=-p\log p-(1-p)\log(1-p),\quad p=\frac{m}{2d}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-c715a60599c4cd3e7ce66972b71487f4_l3.svg "Rendered by QuickLaTeX.com")
This means that even if you require small intersections, you can fit an exponential number of codewords, just with a smaller exponent. The Johnson bound deals with vectors of fixed weight, and we will not go there now, but the point stands: you can fit a lot of codewords with small intersections, asymptotically much more than d, and this gives us a way to store a lot of vectors in associative memory as long as we are okay with imperfect retrieval.
Now we have a much better intuition for what is going on in linear attention Transformers. But where will the improvements come from?
Improving Linear Transformers
While linear Transformers are more efficient than classical self-attention and reduce its complexity from quadratic to linear, this efficiency comes at a cost. Linear attention approximations can struggle with tasks that require precise content-based reasoning or long-term memory, and further research is clearly needed.
How can we improve upon the architecture above? We have already seen that the kernel can be different. But once you start thinking about updates to as storing key-value pairs in memory, the update itself also becomes a promising point of possible new approaches: maybe summation is not the best way to store things in memory?
So at this point, we see that the linear self-attention structure breaks down into four decisions, each of which can suggest directions for improvement:
- the nonlinear transformation of the key and value vectors before storing them in ;
- the memory update rule for itself; let us call it
 :
:  ;
; - the normalization mechanism, which so far has been either absent or via direct accumulation in the vector ; in theory, we could normalize the key, value, and query vectors separately, or just normalize the hidden state;
- the mechanism for producing the output vector
 from the query
from the query  and the hidden state matrix .
and the hidden state matrix .
I have illustrated the general scheme below, showing where these different items go in the architecture. Let us now consider these directions one by one.
First, for the nonlinear transformation Katharopoulos et al. (2020) suggested to use either the identity function or the exponential linear unit ELU, a variation of ReLU with nonzero derivative everywhere (plus one to make  nonnegative):
nonnegative):
![\[\phi(a) = \mathrm{ELU}(a)+1 = \begin{cases}a+1, & a\ge 0,\\ e^a, & a < 0.\end{cases}\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-c09d0fbf4a31995896d2f4192050a39d_l3.svg "Rendered by QuickLaTeX.com")
Here is basically an activation function, operating independently on every component of and . However, in the previous section we motivated the function as an approximation to the numerator of softmax, i.e., we would ideally want
![\[\phi(\mathbf{k})^\top\phi(\mathbf{v}) \approx e^{\mathbf{k}^\top\mathbf{v}},\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-5b9ba72b2710e5c5066ca40e79419a9c_l3.svg "Rendered by QuickLaTeX.com")
which is definitely not the case for ELU+1.
The Performer architecture (Choromanski et al., 2021) introduced a version of which is a much better approximation for softmax. They provide a detailed proof that we will not reproduce here, but in essence their approach, called FAVOR+ for Fast Attention Via positive Orthogonal Random features, uses random linear transformations in such a way that the expected result is indeed the softmax kernel shown above: they define
![\[h(\mathbf{x}) = \frac{1}{\sqrt{2}}e^{-\frac12|\mathbf{x}|^2},\qquad \phi(\mathbf{x}) = \frac{1}{\sqrt{m}}h(\mathbf{x})\left(\begin{matrix} e^{\mathbf{R}\mathbf{x}} \\ e^{-\mathbf{R}\mathbf{x}}\end{matrix}\right),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-9fcc0684585435479b3b597e468c3652_l3.svg "Rendered by QuickLaTeX.com")
where  is an
is an  random matrix whose every row is drawn from the standard Gaussian in dimension , and prove that the expectation of coincides with the softmax kernel
random matrix whose every row is drawn from the standard Gaussian in dimension , and prove that the expectation of coincides with the softmax kernel  , and that
, and that
![\[\phi(\mathbf{k})^\top\phi(\mathbf{v}) \longrightarrow_{m\to\infty} e^{\mathbf{k}^\top\mathbf{v}}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-4c3187a2bf6d681a93251476e8381a7d_l3.svg "Rendered by QuickLaTeX.com")
Schlag et al. (2021) introduce the so-called deterministic parameter-free projection (DPFP), an approach where components of are constructed to be orthogonal by design: if  then
then  for all
for all  other than
other than  . This can be achieved with ReLU activations if you just design them so that their nonnegative areas do not overlap. For example, can map to
. This can be achieved with ReLU activations if you just design them so that their nonnegative areas do not overlap. For example, can map to  as follows:
as follows:
![\[\phi\left(\left(\begin{matrix}k_1 & k_2\end{matrix}\right)^\top\right) = \left(\begin{matrix} r(k_1)r(k_2) & r(-k_1)r(k_2) & r(k_1)r(-k_2) & r(-k_1)r(-k_2) \end{matrix}\right)^\top,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-13e11550102b571cdcf7a064d160cfd4_l3.svg "Rendered by QuickLaTeX.com")
where  is the ReLU activation function. Note how regardless of the input vector all components of
is the ReLU activation function. Note how regardless of the input vector all components of  except one are zero because either
except one are zero because either  or
or  is always zero. The authors generalize this approach to higher dimensions as well; note that ReLUs are also very computationally efficient, much more so than computing exponents.
is always zero. The authors generalize this approach to higher dimensions as well; note that ReLUs are also very computationally efficient, much more so than computing exponents.
Second, let’s turn to the memory update rule. As the number of vectors stored in associative memory increases over the matrix dimension d, the memory mechanism should ideally figure out which vectors to “overwrite”. This is especially important because in practice, you may get a new key-value pair that is similar to an already existing key that points to an already similar value, in which case you don’t really want to overwrite anything at all but rather update the value a little so that both keys will retrieve a good enough approximation of it.
Schlag et al. (2021) propose the following approach here: for a new key-value pair  , retrieve
, retrieve  that is already stored in memory by the key (you can always do retrieval in associative memory, if we are not yet at memory capacity it will just return zero) and store a convex combination of and . The coefficient of this combination, the “overwrite force” for this vector, can also be derived from the inputs. Formally, we define
that is already stored in memory by the key (you can always do retrieval in associative memory, if we are not yet at memory capacity it will just return zero) and store a convex combination of and . The coefficient of this combination, the “overwrite force” for this vector, can also be derived from the inputs. Formally, we define
![\[\mathbf{v}'_t = \mathbf{S}_{t-1}\phi(\mathbf{k}_t),\quad \beta_t = \sigma\left(\mathbf{W}^\beta\mathbf{x}_t\right),\quad \mathbf{v}^{\mathrm{new}}t = \beta_t\mathbf{v}_t + (1-\beta_t)\mathbf{v}'_t,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-4fd113042fcb55b6097b6d63b46311eb_l3.svg "Rendered by QuickLaTeX.com")
and then in the matrix state computation we erase from memory and write in  , getting
, getting
![\[\mathbf{S}_t = \mathbf{S}_{t-1} - \mathbf{v}'_t\phi(\mathbf{k}_t)^\top + \mathbf{v}^{\mathrm{new}}_t\phi(\mathbf{k}_t)^\top = \mathbf{S}_{t-1} + \beta_t\left(\mathbf{v}_t - \mathbf{v}'_t\right)\phi(\mathbf{k}_t)^\top.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-03f10d9d5aadd39564b5697db91e9aae_l3.svg "Rendered by QuickLaTeX.com")
Third, for normalization you can use attention normalization as suggested by Katharopoulos et al. (2020) or, for instance, sum normalization where query and key vectors are divided by the sums of their own components. Normalization can be done only at the level of queries, keys, and values, or also at the output ot, and so on, and so forth.
The possibilities are endless, and indeed, one can think of a lot of different modifications for the above formulas. Some of them explore different feature functions, others change how combinations and moving averages are computed, yet others add various gates to the architecture up to the complexity of an entire LSTM (Peng et al., 2021; Beck et al., 2024). The summary table below is taken from a recent work by Yang et al. (2024), which in turn proposes yet another approach in this vein:
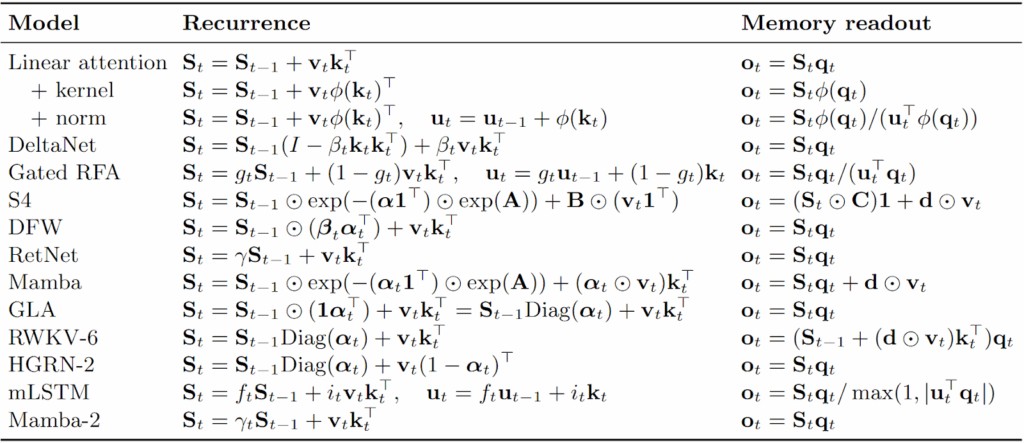
Naturally, I don’t want to go over the entire table here; we are already acquainted with several rows in this table enough that you can mostly understand the motivation behind the others. But there is one more important direction that leads to interesting new ideas and that has been growing in popularity lately, so I want to explore it in more detail.
Mamba: Transformers are State Space Models
While linear attention provides a scalable alternative to Transformer’s self-attention, it still struggles with tasks requiring explicit reasoning over long-term dependencies or fine-grained temporal dynamics. In this section, we discuss state space models that provide an alternative perspective: instead of focusing on approximating attention, they model sequences as evolving states governed by differential equations. This still allows the system to handle long-range dependencies while at the same time learning structured dynamics inspired by control theory.
To explain what is going on in Mamba, we need to take a step back yet again, this time to state space models. A state space model (SSM) is another way to process sequential input, very similar to RNNs in that an SSM also has a hidden state  that is supposed to capture all relevant information about the current state of the system. But the state space model looks at system evolution from a continuous standpoint, considering the dynamical system
that is supposed to capture all relevant information about the current state of the system. But the state space model looks at system evolution from a continuous standpoint, considering the dynamical system
![\[\dot{\mathbf{h}}(t) = \mathbf{A}\mathbf{h}(t) + \mathbf{B}\mathbf{x}(t),\qquad \mathbf{o}(t) = \mathbf{C}\mathbf{h}(t)+\mathbf{D}\mathbf{x}(t).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-ee279e200680b72f7c720dc26af14596_l3.svg "Rendered by QuickLaTeX.com")
Here is an illustration:
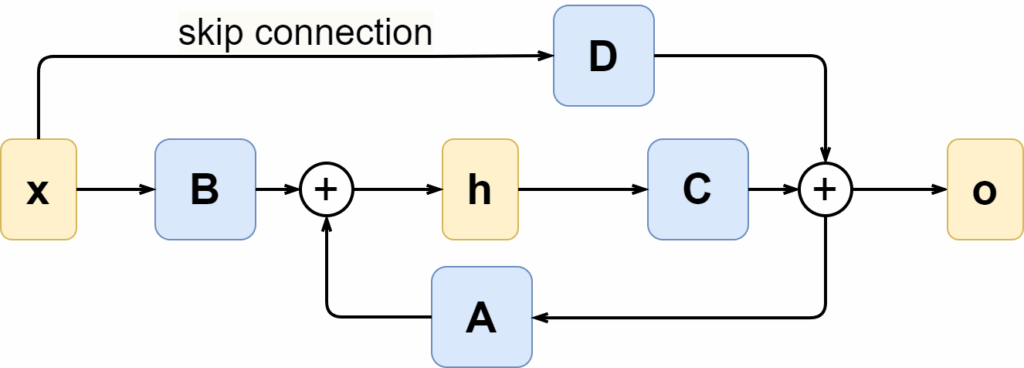
Note that the direct dependence of the output o(t) on the input x(t) can be thought of as a skip connection going around the dynamical system, so below we will assume that D=0.
This approach has its roots in control theory; the famous Kalman filter (Kalman, 1960) is a special case of SSMs, and classical control theory has a lot of results on such linear dynamical systems (Jazwinski, 1970; Kailath, 1980), spilling over into econometrics and generally time series analysis (Hamilton, 1994).
The equations above look just like a classical RNN; the main difference is that they are continuous, so we can hardly expect to be able to work with them unless we can discretize continuous signals and vice versa, turn discrete inputs (such as text) into continuous signals. In this approach, it is usually enough to consider the zero-hold model, where a discrete input is turned into a set of step functions with step size Δ, and a continuous signal is sampled according to the input timesteps. Discretization of dynamical systems proceeds via matrix exponentials that result from solving the differential equations above on an interval ![[t, t+\Delta t]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-f58d7ff90bd55a347fd97f941f213f09_l3.svg "Rendered by QuickLaTeX.com") , where the input
, where the input  can be assumed constant, so the solution is
can be assumed constant, so the solution is
![\[\mathbf{h}(t+\Delta) = e^{\Delta\mathbf{A}}h(t) + \left(\int_{0}^{\Delta}e^{\mathbf{A}\tau}\mathrm{d}\tau\right)\mathbf{B}(t).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-8347c85ff7831cb12796cafa5212506d_l3.svg "Rendered by QuickLaTeX.com")
As a result, we can define discretized versions of the matrices and  (see, e.g., Grootendorst, 2024 for a more detailed explanation) as
(see, e.g., Grootendorst, 2024 for a more detailed explanation) as
![\[\bar{\mathbf{A}} = e^{\Delta \mathbf{A}},\qquad\bar{\mathbf{B}} = \left(\int_0^{\Delta} e^{\mathbf{A}\tau}\mathrm{d}\tau\right)\mathbf{B} = \mathbf{A}^{-1}\left(e^{\Delta \mathbf{A}} - \I\right)\mathbf{B}\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-5d4bb23680ff2d935f5dfc3e11cde240_l3.svg "Rendered by QuickLaTeX.com")
and treat this discretized version of an SSM as a linear RNN with update rule (omitting  as discussed above)
as discussed above)
![\[\mathbf{h}_t = \bar{\mathbf{A}}\mathbf{h}_{t-1} + \barB\mathbf{x}_{t},\qquad \mathbf{o}_t = \mathbf{C}\mathbf{h}_t.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-4e348570db347d4441891265e6512c23_l3.svg "Rendered by QuickLaTeX.com")
Note that this is not the only way to do discretization, for example, Gu et al., 2022 use a bilinear method where
![\[\bar{\mathbf{A}} = \left(\mathbf{I} - \frac{\Delta}{2}\mathbf{A}\right)^{-1}\left(\mathbf{I} + \frac{\Delta}{2}\mathbf{A}\right),\qquad\bar{\mathbf{B}} = \left(\mathbf{I} - \frac{\Delta}{2}\mathbf{A}\right)^{-1}\Delta\mathbf{B}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-0232fd50b80d9777c8c2c513310ed0d6_l3.svg "Rendered by QuickLaTeX.com")
Moreover, doing everything via discretizations of continuous functions has other advantages; for example, we can seamlessly handle missing data by simply continuing the discretization over a longer time period (where we do not have new data).
Finally, we can also note that in this formulation, every output can be easily represented as a series depending on the inputs :
![\[\mathbf{o}_t = \mathbf{C}\mathbf{h}_t = \mathbf{C}\bar{\mathbf{B}}\mathbf{x}_t + \mathbf{C}\bar{\mathbf{A}}\mathbf{h}_{t-1} = \mathbf{C}\bar{\mathbf{B}}\mathbf{x}_t + \mathbf{C}\bar{\mathbf{A}}\bar{\mathbf{B}}\mathbf{x}_{t-1} + \mathbf{C}\bar{\mathbf{A}}^2\bar{\mathbf{B}}\mathbf{x}_{t-2} + \ldots,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-6ea4893847e1e18c296d7e5efe4c4ddf_l3.svg "Rendered by QuickLaTeX.com")
which can be thought of as a convolution operator: to get , we convolve the input series with the kernel
![\[\bar{\mathbf{K}} = \left(\mathbf{C}\bar{\mathbf{B}}, \mathbf{C}\bar{\mathbf{A}}\bar{\mathbf{B}}, \mathbf{C}\bar{\mathbf{A}}^2\bar{\mathbf{B}}, \ldots, \mathbf{C}\bar{\mathbf{A}}^{L-1}\bar{\mathbf{B}}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-3096b6e10d6e9e1dce8bdaef1e96769f_l3.svg "Rendered by QuickLaTeX.com")
 is called the SSM convolution kernel, and if it is known, the SSM can be very efficiently computed in parallel during training, when we have the entire input sequence
is called the SSM convolution kernel, and if it is known, the SSM can be very efficiently computed in parallel during training, when we have the entire input sequence  available, just like any autoregressive model. Computing , however, is a nontrivial task that also requires new tricks.
available, just like any autoregressive model. Computing , however, is a nontrivial task that also requires new tricks.
But whatever the discretization formulas, the resulting RNN will not really work as intended. This is a classical approach that has been well-known for decades, and, of course, people have tried to apply it to machine learning. But they had always found this approach to lack long-term memory because of vanishing and/or exploding gradients due to all of this matrix multiplication, which is precisely the point of having a recurrent network in the first place.
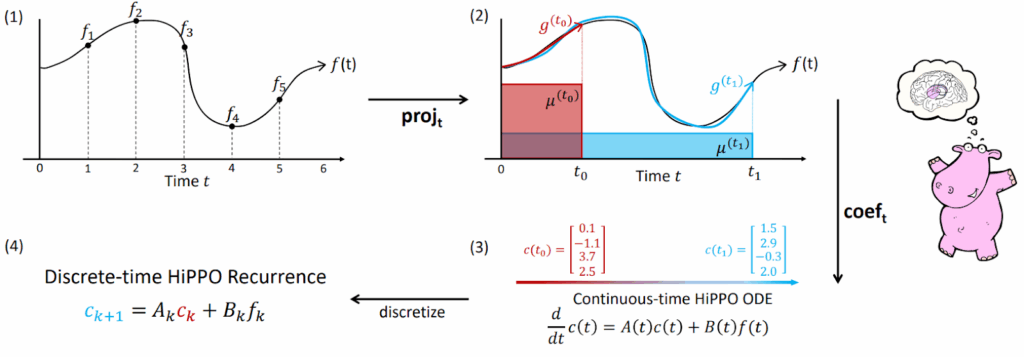
To add long-term memory, we need one more technique developed by Gu et al. (2020): we need to replace the matrix with the so-called “HiPPO matrix”, where HiPPO stands for high-order polynomial projection operators. The HiPPO approach begins with a different question: how do we compress the entire history of an input function , namely  , into a functional representation? The core idea is to approximate the function
, into a functional representation? The core idea is to approximate the function  of by projecting it onto a space spanned by orthogonal polynomials. With this approach, HiPPO can handle long-range dependencies without needing explicit priors on the timescale, which is crucial for data with unknown or variable temporal scales.
of by projecting it onto a space spanned by orthogonal polynomials. With this approach, HiPPO can handle long-range dependencies without needing explicit priors on the timescale, which is crucial for data with unknown or variable temporal scales.
Without going into too much mathematical details (for those, see the original paper), HiPPO operates as follows: for a function where we are interested in operating on its current history ,
- define approximation quality in the space of (square integrable) functions via a probability measure μ; this measure can be used to give recent information more weight than past history (or not);
- choose the approximation order
 and choose a polynomial basis of degree ; HiPPO usually works with either Legendre polynomials and a uniform measure on the history (HiPPO-LegS) or Laguerre polynomials and an exponentially decaying measure (HiPPO-LagT);
and choose a polynomial basis of degree ; HiPPO usually works with either Legendre polynomials and a uniform measure on the history (HiPPO-LegS) or Laguerre polynomials and an exponentially decaying measure (HiPPO-LagT); - find the optimal approximation, i.e., find the coefficients of a polynomial
 in the chosen basis that minimizes the approximation quality
in the chosen basis that minimizes the approximation quality ![\[\|f_{\le t} - g\|_{L_2(\mu)} \longrightarrow_g \min;\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-58310d48687b25700a5081465fcbc823_l3.svg "Rendered by QuickLaTeX.com")
- the whole point of HiPPO is that one can construct a differential equation to maintain these coefficients incrementally; for a vector of coefficients
 , you can write down matrices
, you can write down matrices  and
and  such that
such that ![\[\dot{\mathbf{c}}(t) = \mathbf{A}(t)\mathbf{c}(t) + \mathbf{B}(t)f(t);\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-7a52181516a60854dd0d6f437616bae3_l3.svg "Rendered by QuickLaTeX.com")
- and finally, this differential equation can also be discretized to find a recurrence on the polynomial coefficients for the optimal approximation of a discrete time series
 :
: ![\[\mathbf{c}_{k+1} = \mathbf{A}_k\mathbf{c}_k + \mathbf{B}_kf_k.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-8f5f21f15021ff6d63610ca3fa20d2ec_l3.svg "Rendered by QuickLaTeX.com")
Here is an illustration from the original paper that shows this sequence of steps:
Gu et al. (2020) derive specific formulas for the HiPPO matrices. For their scaled Legendre measure (HiPPO-LegS) the matrix dynamics are
![\[\dot{\mathbf{c}}(t) = -\frac 1t \mathbf{A}\mathbf{c}(t) + \frac 1t\mathbf{B} f(t),\qquad \mathbf{c}_{k+1} = \left(1 - \frac{1}{k}\mathbf{A}\right)\mathbf{c}_k + \frac 1k\mathbf{B} f_k,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-98fd7e2866eaf2fdaaefbce66ed29b8f_l3.svg "Rendered by QuickLaTeX.com")
where and are constant:
![\[A_{nk} = \begin{cases}\sqrt{(2n+1)(2k+1)}, & n>k, \ n+1, & n=k, \ 0, & n<k,\end{cases}\quad\text{e.g.},\quad\mathbf{A} = \left(\begin{matrix} 1 & 0 & 0 & 0 & 0 \\\sqrt{3} & 2 & 0 & 0 & 0 \\\sqrt{5} & \sqrt{3\cdot 5} & 3 & 0 & 0 \\\sqrt{7} & \sqrt{3\cdot 7} & \sqrt{5\cdot 7} & 4 & 0 \\3 & 3\sqrt{3} & 3\sqrt{5} & 3\sqrt{7} & 5\end{matrix}\right),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-829694e9ac67eec59418aa8bff2d1360_l3.svg "Rendered by QuickLaTeX.com")
and  .
.
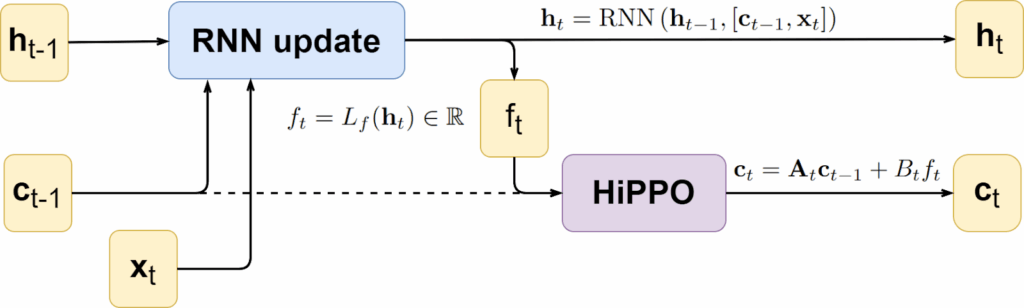
That was quite a lot of math that’s very different from what we are used to here—but bear with me, we are back to machine learning territory. At this point, we have a method that can take a time series as input and produce a good vector representation for its entire history; moreover, the method reduces to using a couple of matrices whose coefficients can be updated recursively with time too. This means that we can, for example, plug HiPPO into a regular RNN, adding another state ct and replacing the hidden state ht with a representation of its entire history; this has been done in the original paper on HiPPO as follows, for an arbitrary RNN update:
In SSMs, the HiPPO matrix is used to initialize the transition matrix A, significantly alleviating the problem of long-range dependencies. It may sound a little strange because as soon as we begin updating the weights, the matrix A loses its HiPPO properties: it no longer corresponds to the Legendre or Laguerre polynomials, or to any orthogonal basis in the functional space at all. However, experiments show that this initialization does help a lot with implementing long-term memory.
The second problem we need to solve is computational complexity: so far, SSMs require repeated multiplication by the discretized version of A, so the naive complexity is O(d2L), where d is the input vector dimension and L is the sequence length. The main contribution of the S4 model (structured state space sequence model) introduced by Gu et al. (2022) is a much faster way to compute all views of the SSM model, i.e., both recurrent matrices used at inference and convolutions used at training. The ideas of S4 would be way too mathy to put in this post; fortunately, I can refer to “The Annotated S4”, a detailed post by the S4 authors that shows all derivations and also provides the corresponding PyTorch code and illustrations. For now, let us just assume that all of the above can be done efficiently.
The next step was taken by Smith et al. (2022) who moved from single-input, single-output SSM layers to multi-input, multi-output layers, allowing xt and ot to become vectors; their model is known as S5 (simplified structured state space for sequence modeling).
With this, we finally come to Mamba (Gu, Dao, 2024), also known as S6 (S4 + selective scan). The main step forward in Mamba is recognizing that so far, the model dynamics have had to be constant: matrices A, B, C, and step size Δ can be trainable from mini-batch to mini-batch but they cannot depend on the input xt; otherwise, we wouldn’t be able to implement the convolutional kernel K which is key to efficient training. This significantly limits the expressive power of S4: its mechanism cannot do content-aware reasoning, it cannot choose which parts of xt are more important and filter out the rest, and so on.
Gu and Dao (2024) introduce the selective scan algorithm that lets B, C, and Δ (not A, though) depend on xt while still providing an efficient algorithm for training. In essence, they find a middle ground between the two extremes:
- in RNNs and S4, the state has a (relatively small) fixed size so we cannot fit too much in the hidden state, leading to problems with long-term memory;
- in Transformers, the state is basically the entire sequence, so there is no memorization problem (you have direct access to everything) but lots of problems with processing long sequences (that we have been discussing today and in a previous post);
- the word “selective” in “selective scan” means that Mamba chooses which information to put in a state, with context-dependent mechanisms for putting something into the hidden state and ignoring other parts of the input.
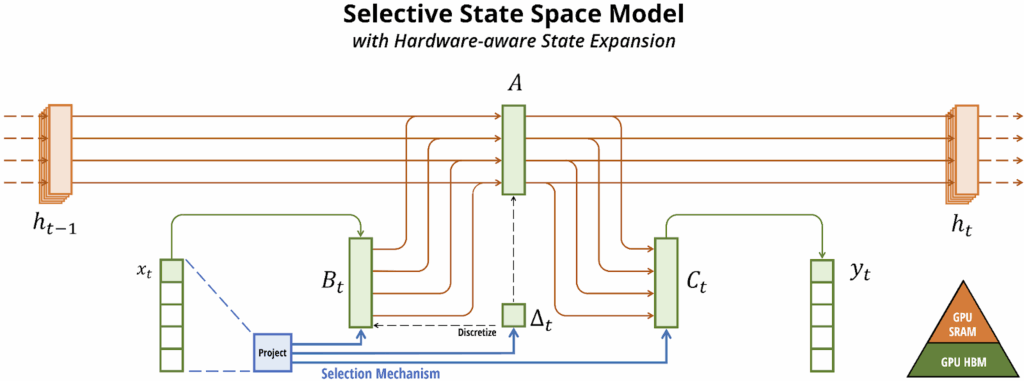
Again, the technical details of the algorithm are too involved for this post—it even makes use of hardware optimization, being specifically tailored for GPUs and TPUs. But the result is the Mamba block that can be stacked in a neural network. It includes the following selective state space model as a replacement for the attention mechanism:
Mamba was big news. A viable alternative to Transformers that even outperformed existing open source language models with an equivalent number of parameters. So it is no wonder that researchers picked up this idea and ran with it, with a lot of papers already extending and improving upon the basic Mamba architecture.
For example (I’m only listing some of the most interesting ones):
- Mamba was never limited to language modeling; the original paper already applied Mamba to audio processing and modeling genomic sequences; Vision Mamba (ViM; Zhu et al., 2024) is a good representative of how Mamba can be applied to image processing; they show improved results with an architecture very similar to the Vision Transformer (ViT; Dosovitsky et al., 2020) but based on Mamba blocks; another way to process images has been suggested in the VMamba architecture (Liu et al., 2024), which is an interesting combination of CNNs and Mamba;
- U-Mamba (Ma et al., 2024) goes even further and shows that Mamba is not limited to Transformer-like architectures: this is a U-Net-based architecture intended for biomedical image segmentation, and the authors design a CNN-SSM block, a hybrid between convolutions and Mamba, which improves segmentation results;
- among more advanced versions of image segmentation, SegMamba (Xing et al., 2024) considers 3D image segmentation while Video Vision Mamba (ViViM; Yang et al., 2024) does segmentation in video, and MambaMorph (Guo et al., 2024) uses a Mamba-based architecture to establish the correspondence between two important biomedical modalities, MR and CT scans;
- MoE-Mamba (Pioro et al., 2024) adds the mixture of experts (MoE) idea to a Mamba block, leading to a much more efficient architecture; MoE variations of Transformers and other models are a separate can of worms that I plan to open in some future post.
As you can see, the ideas of Mamba have been actively developed by the deep learning community over the last year… actually, no, you don’t see the full extent of it yet. I introduced a hidden constraint here: the original Mamba paper was first published in December 2023, and all the papers cited in the list above are from January 2024! In only a month, Mamba already became a staple of deep learning, and by now, a survey by Qu et al. (2024, last revised in mid-October) has 244 citations—not all of them are Mamba-based models, of course, but it looks like over a hundred, if not more, are Mamba variations published in 2024.
This is the crazy research landscape we are living in now, and, of course, I cannot give a full survey here, so I will only highlight a direct continuation: Mamba 2 (Dao, Gu, 2024), developed by the authors of the original, dives further into the Mamba algorithm and makes it even more efficient with its state space duality (SSD) framework. It very much looks like Mamba-based models are reliably beating Transformers in many long-context tasks, combining the efficiency of linear attention with the structured adaptability of SSMs.
Conclusion
Linear attention and state space models like Mamba represent a new wave of more efficient models that alleviate the quadratic complexity problem of basic self-attention. These models revisit foundational ideas from RNNs and associative memory but also redefine how we think about integrating memory and content-aware reasoning into neural architectures. They are already pushing the boundaries of scalable and content-aware sequence modeling, and this research direction is far from completely explored.
In this post, we have discussed the basic ideas of linear attention; I have tried to explain the foundations of these models—the kernel trick, associative memory, state space models—that date back a long time. This is another case where recent results can be placed in the context of a machine learning timeline that dates back many decades; here is my take on the timeline of the main ideas we mentioned today:
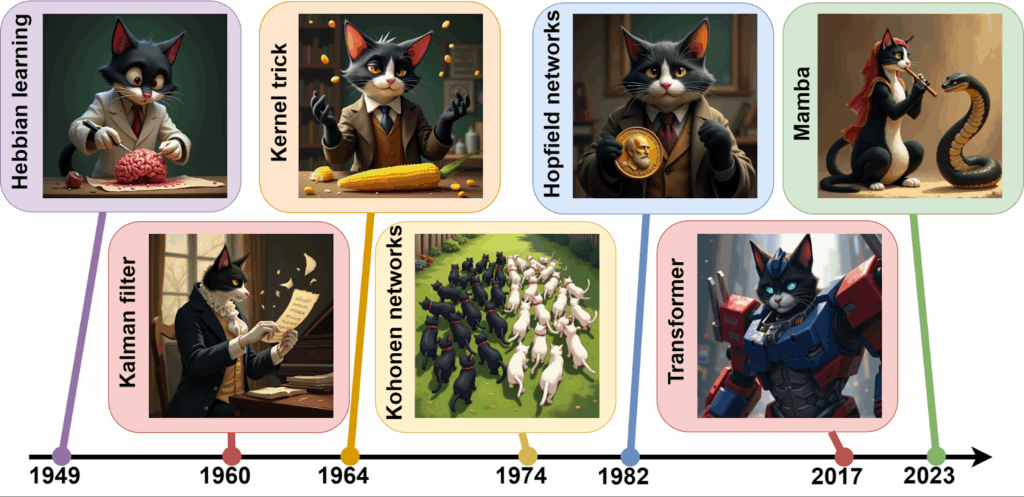
Once these ideas get picked up in a new form, such as Mamba, progress starts anew, and these days it proceeds at a breakneck pace. I hope that this post gives a clear understanding that this is still very much a work in progress, and new results will probably augment these ideas in the nearest future. Existing results already suggest many exciting applications: not only improved language modeling but also applications to genomics, image processing, audio processing, and more have already been explored in Mamba-like models.
Moreover, we can already look ahead a little. State space models, kernel-based attention, and hardware-aware optimizations in Mamba hint at a future where memory-intensive applications such as long-context language modeling and large-scale genomic analysis are not only feasible but practical. In this future, neural networks may be able to dynamically tailor their computation to the input; perhaps we are witnessing the birth of a new paradigm for sequence modeling.
As research in Mamba and its successors continues, we are also likely to see further breakthroughs in one of the most important issues that still remains to be solved: how can neural networks manage and process memory? In my opinion, memory is still an unresolved challenge; increasing the context size is not the same as having a working memory, but the selective state space models developed in Mamba actually come much closer. I am very excited to see what the next step will be.
Sergey Nikolenko
Head of AI, Synthesis AI
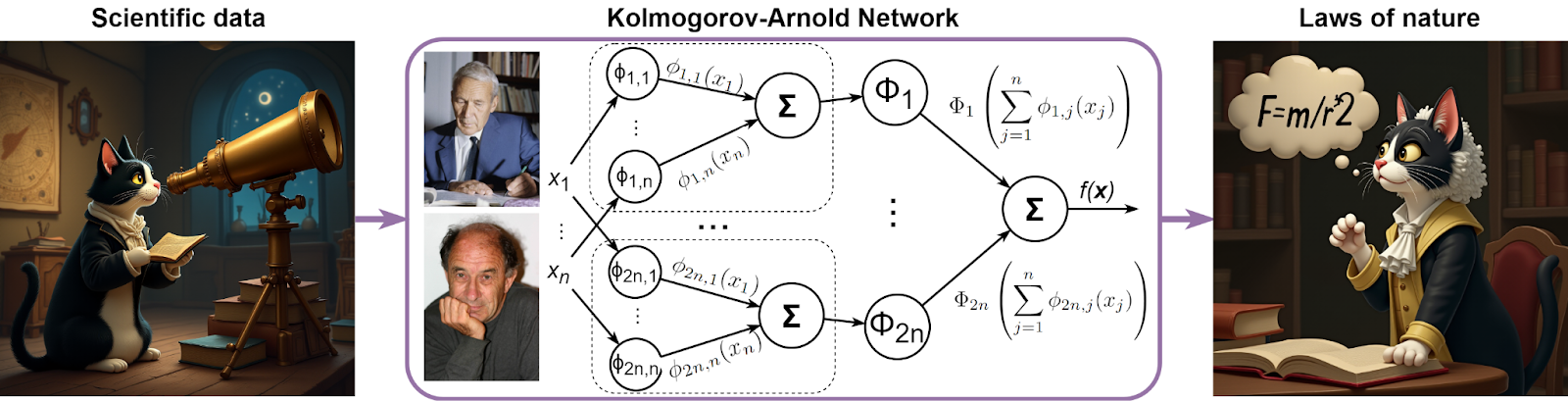
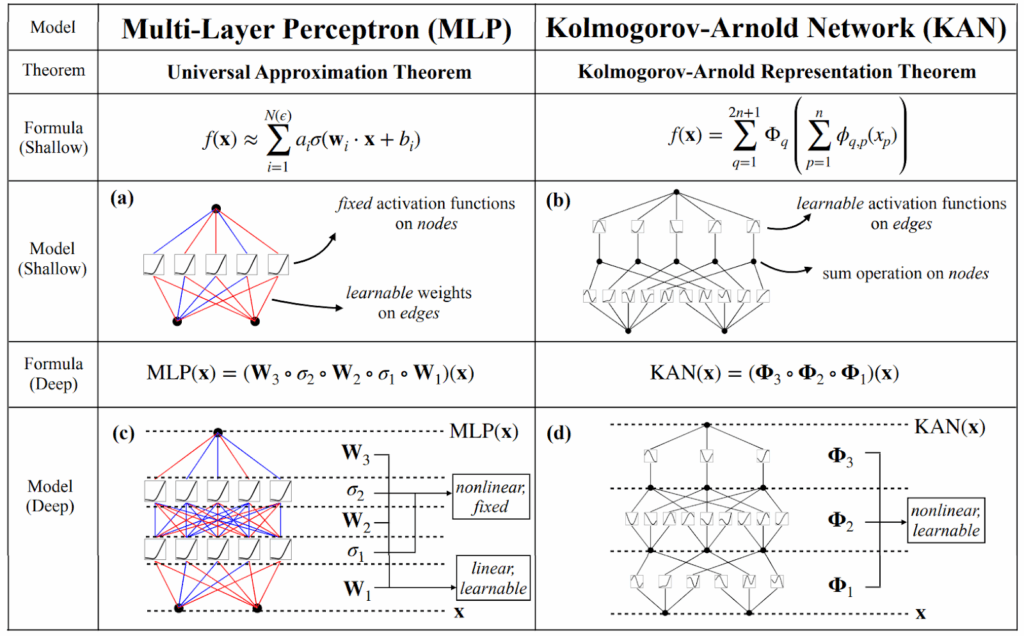
![\[f(\mathbf{x})=f(x_1,\ldots,x_n)=\sum_{i=0}^{2n}\Phi_i\left(\sum_{j=1}^n\phi_{i,j}(x_j)\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-97c10f06e489d3e8726443245ec665a2_l3.svg "Rendered by QuickLaTeX.com")
 and
and  are arbitrary functions of a single variable, and the theorem says that this is enough: to represent any continuous function, you only need to use sums of univariate functions in a two-layered composition:
are arbitrary functions of a single variable, and the theorem says that this is enough: to represent any continuous function, you only need to use sums of univariate functions in a two-layered composition: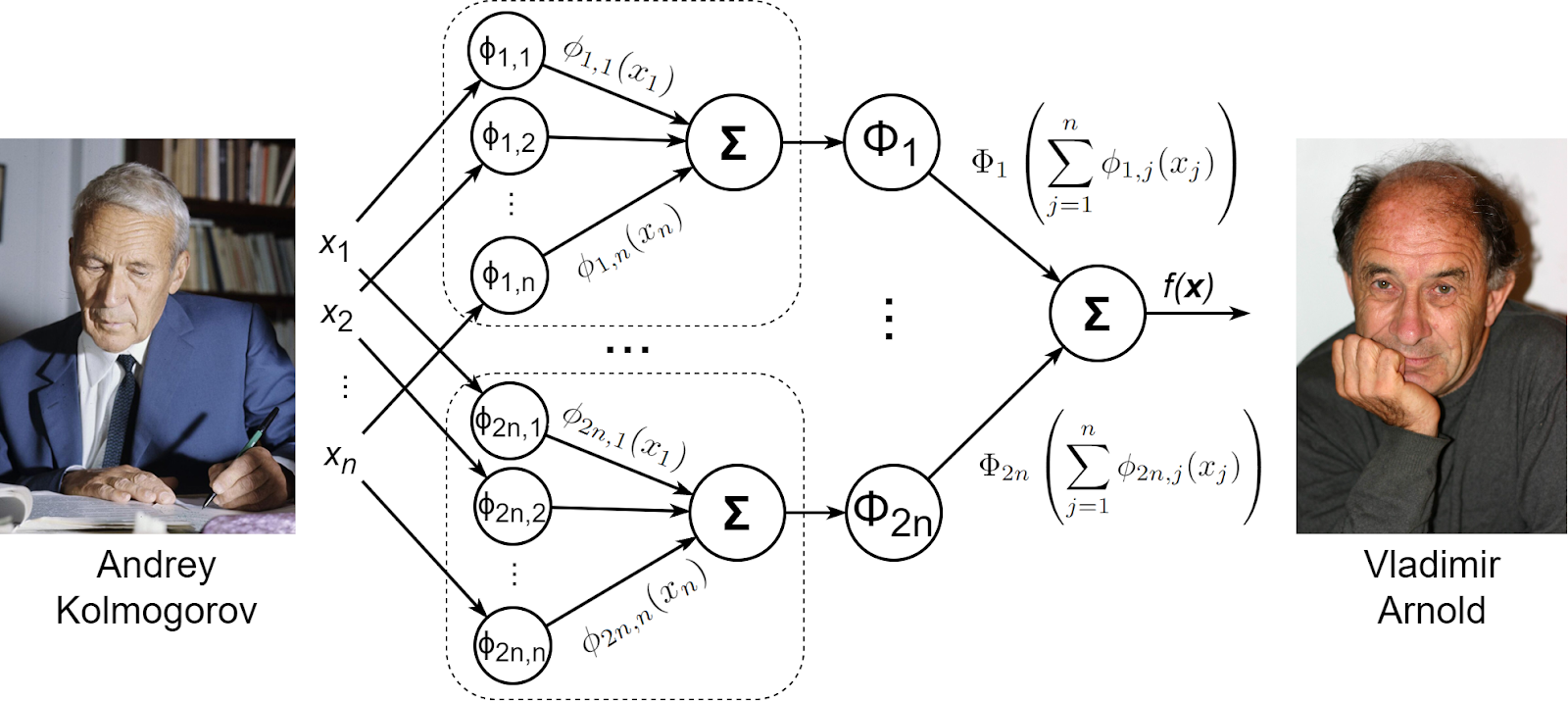
 refer to the same n which is the dimension of
refer to the same n which is the dimension of ![\[x^7+ax^3+bx^2+cx+1=0.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-a97774016603a8ef1b48e6fd28e207de_l3.svg "Rendered by QuickLaTeX.com")
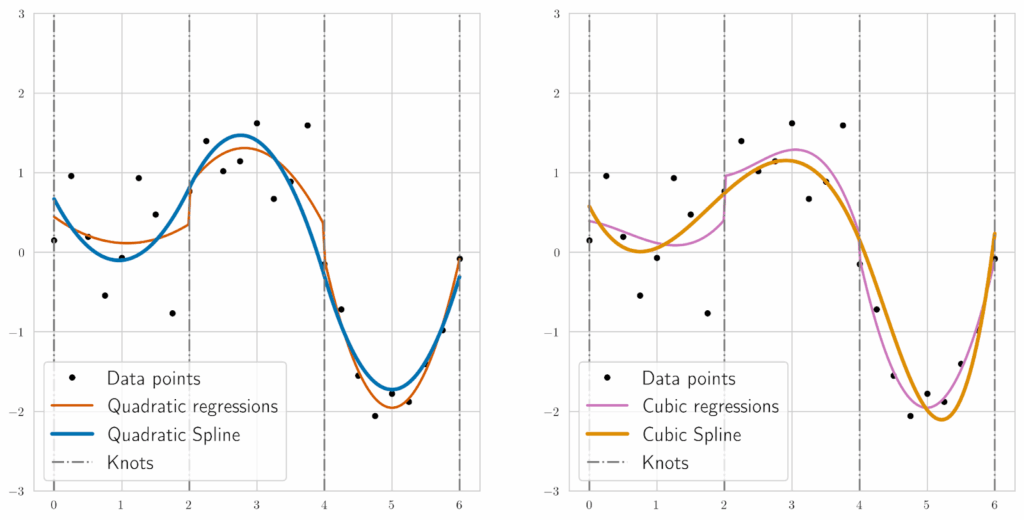
![[a,b]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-4395e14a46064646ae46377d9e1a4be7_l3.svg "Rendered by QuickLaTeX.com") where the data points lie and break it down with intermediate points
where the data points lie and break it down with intermediate points  , the knots, getting
, the knots, getting  intervals:
intervals:![\begin{align*}a&=t_0\le t_1\le t_2\le\ldots t_{k-1}\le t_k = b,\\ [a,b]&=[a=t_0,t_1)\cup [t_1,t_2)\cup\ldots\cup[t_{k-1},t_k=b].\end{align*}](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-106988c94847ec01261058aa436cfa13_l3.svg "Rendered by QuickLaTeX.com")
 of degree
of degree ![p_i:[t_i, t_{i+1}]\to\mathbb{R}](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-72f17c559baa0053a309ee6fe0452153_l3.svg "Rendered by QuickLaTeX.com") , so that:
, so that: :
: ![\[\sum_{i=0}^{k-1}\sum_{n:x_n\in[t_i,t_{i+1})}\left(y_n-p_i(x_n)\right)^2\longrightarrow\min;\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-6353f51a046c05ab418c7eee0984b19e_l3.svg "Rendered by QuickLaTeX.com")
 -th to match: for all
-th to match: for all  to
to  ,
, ![\[p_{i-1}(t_i)=p_i(t_i), \frac{dp_{i-1}}{dx}(t_i)=\frac{dp_{i}}{dx}(t_i),\ldots,\frac{d^{d-1}p_{i-1}}{dx^{d-1}}(t_i)=\frac{d^{d-1}p_{i}}{dx^{d-1}}(t_i).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-f5725b2a0e298d5f1d787dbbb5e8aa4d_l3.svg "Rendered by QuickLaTeX.com")
 outputs as an
outputs as an  matrix
matrix  of one-dimensional functions with trainable parameters: the
of one-dimensional functions with trainable parameters: the  outputs via
outputs via  combine
combine ![\[\mathrm{KAN}(\mathbf{x}) = \left(\boldsymbol{\Phi}_{L-1}\circ \boldsymbol{\Phi}_{L-2}\circ \ldots \circ \boldsymbol{\Phi}_1\circ \boldsymbol{\Phi}_{0}}\right)\mathbf{x}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-377d3c93c76f757f4252a9d7376c783c_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathrm{MLP}(\mathbf{x}) = \left(\mathbf{W}_{L-1}\circ h\circ \mathbf{W}_{L-2}\circ h \circ\ldots \circ \mathbf{W}_1\circ h\circ \mathbf{W}_{0}}\right)\mathbf{x}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-59103d773bf2467a4c6a6f8de5dd87a7_l3.svg "Rendered by QuickLaTeX.com")
![\[\phi(x) = w_b\cdot b(x) + w_s\cdot s(x),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-dccd99a193f5eddfae8e5ce5f3fd3267_l3.svg "Rendered by QuickLaTeX.com")
 is the sigmoid linear unit (SiLU) activation function and
is the sigmoid linear unit (SiLU) activation function and  is a B-spline:
is a B-spline:![\[b(x) = \frac{x}{1+e^{-x}},\qquad s(x)=\sum_i c_iB_i(x).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-2a4436ff74f233ad5b5472c142814cce_l3.svg "Rendered by QuickLaTeX.com")
 parameters, where
parameters, where  is the number of knots. Liu et al. (
is the number of knots. Liu et al. (![\[f(x,y) = \exp\left(\sin(\pi x) + y^2\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-910e07bfb388bf898adf38bedf416f8e_l3.svg "Rendered by QuickLaTeX.com")
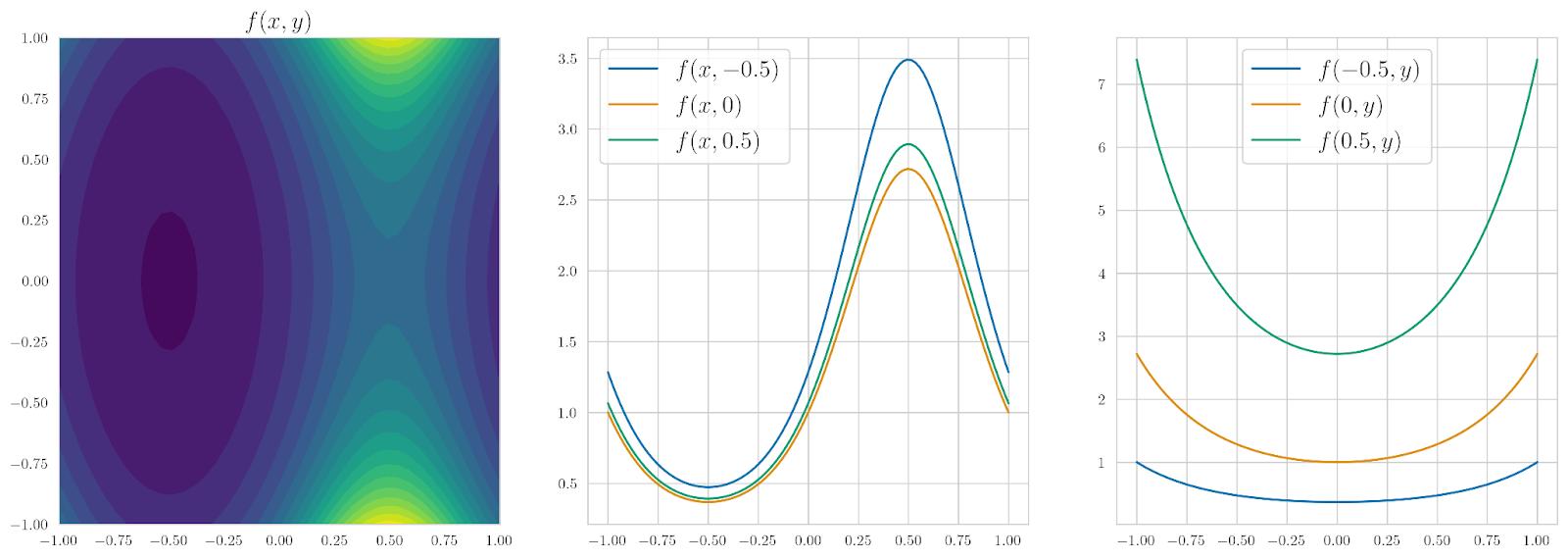
![\[{\hat f}(x, y) = \phi_{2,1}(\phi_{1,1}(x) + \phi_{1,2}(y)).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-bec792ed295d791175f53a7fc375469d_l3.svg "Rendered by QuickLaTeX.com")
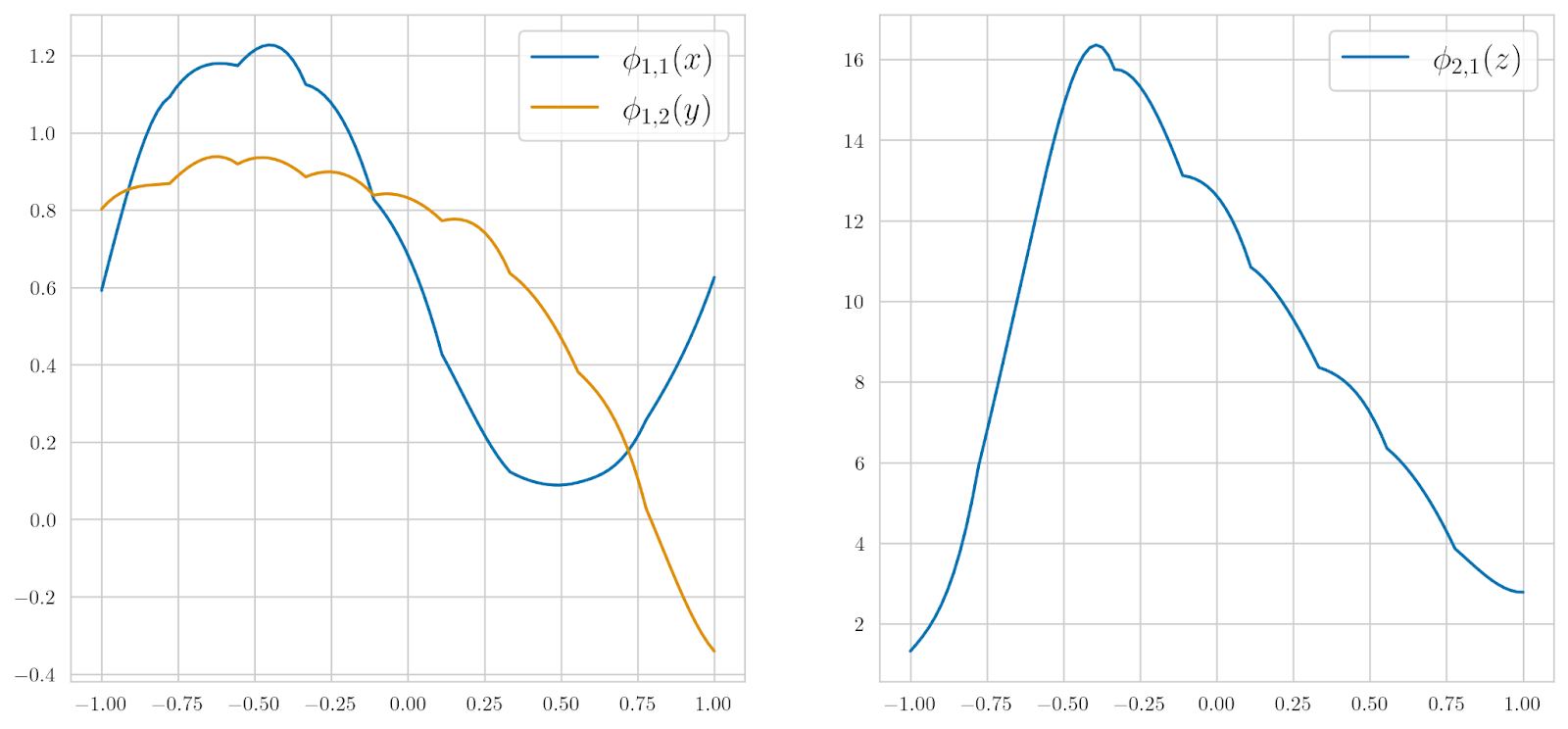
 indeed resembles a sinusoidal function, and
indeed resembles a sinusoidal function, and  looks suspiciously quadratic. Even at this point, we see that KAN not only can train good approximations to complicated functions but can also provide readily interpretable results: we can simply look at what kinds of functions have been trained inside the composition and have a pretty good idea of what kinds of features are being extracted.
looks suspiciously quadratic. Even at this point, we see that KAN not only can train good approximations to complicated functions but can also provide readily interpretable results: we can simply look at what kinds of functions have been trained inside the composition and have a pretty good idea of what kinds of features are being extracted. (actually,
(actually,  in this case, but the minus sign is best left for the linear combination). KAN allows us to substitute our guess symbolically into
in this case, but the minus sign is best left for the linear combination). KAN allows us to substitute our guess symbolically into  and training the rest of the functions. If we do that, we get a much better test set error,
and training the rest of the functions. If we do that, we get a much better test set error,  will still look sinusoidal, and, most importantly, the resulting
will still look sinusoidal, and, most importantly, the resulting 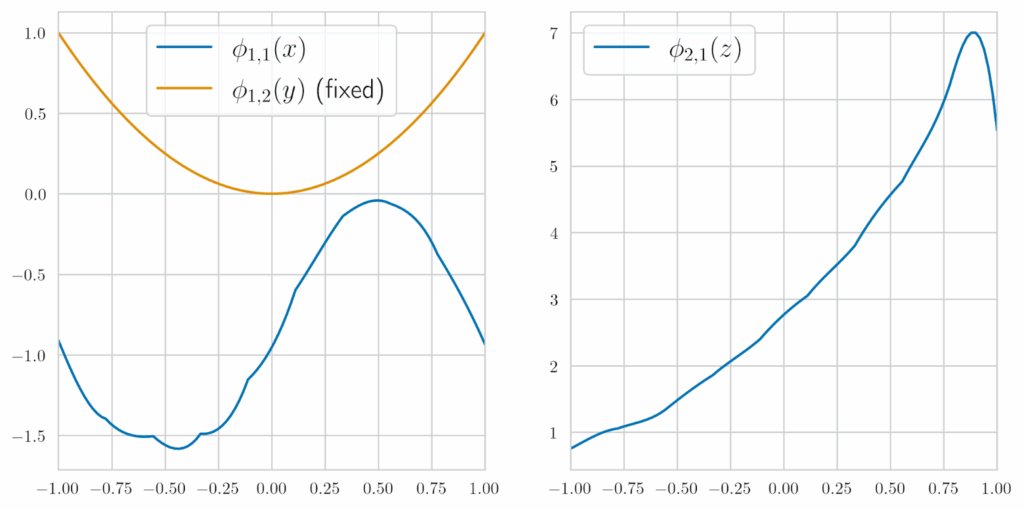
![\[{\hat f}(x) = \sum_{i=1}}^mw_i\phi(\|x-\mu_i\|),\qquad \phi(r) = e^{-c\cdot r^2}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-90c013f570870572b86e586877ec8ec7_l3.svg "Rendered by QuickLaTeX.com")
![\[R_i(x) = \left(\mathrm{ReLU}(e_i-x)\cdot\mathrm{ReLU}(x-s_i)\right)^2\cdot 16/\left(e_i-s_i\right)^4.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-ccf8f8e4663a0bcb18730d953d2d691c_l3.svg "Rendered by QuickLaTeX.com")
 and
and  are trainable parameters, which makes
are trainable parameters, which makes  a rather diverse family of functions, and
a rather diverse family of functions, and  is the regular ReLU activation function; here is an illustration by Qiu et al. (
is the regular ReLU activation function; here is an illustration by Qiu et al. (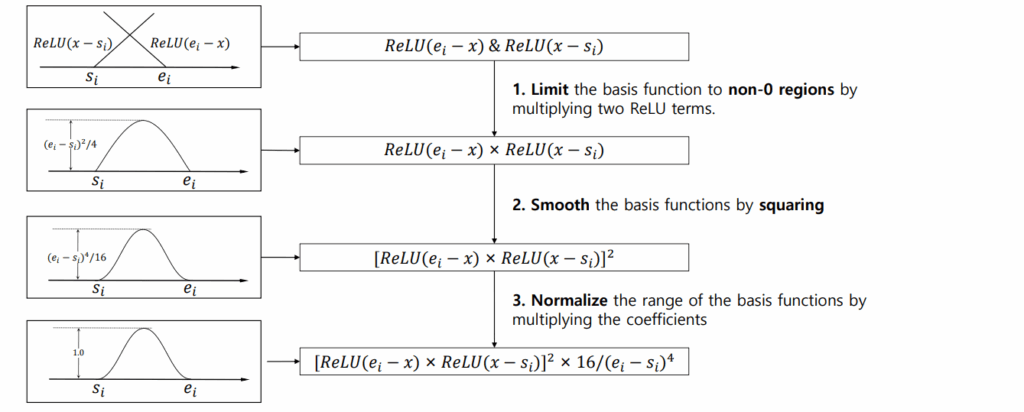

 , while MultKAN would do it with a single multiplication node;
, while MultKAN would do it with a single multiplication node;






 for an input prompt
for an input prompt ![\[p_{\mathrm{LM}}(\mathbf{y} | \mathbf{x},\mathcal{C}) = \sum_{\mathbf{c}\in \mathcal{C}}p_{\mathrm{LM}}(\mathbf{y} | \mathbf{c}\circ \mathbf{x}) p_{\mathrm{R}}(\mathbf{c}| \mathbf{x}),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-477bb77d1c89f5782d91477897ef2da9_l3.svg "Rendered by QuickLaTeX.com")
 is the set of retrieved text chunks
is the set of retrieved text chunks  ,
,  is the probability the retriever assigns to chunk
is the probability the retriever assigns to chunk  is the probability the language model assigns to
is the probability the language model assigns to  , which are just dot products of the query’s and document’s embeddings.
, which are just dot products of the query’s and document’s embeddings. pairs is done separately for the LM and the retriever:
pairs is done separately for the LM and the retriever:![\[\mathcal{L}_{\mathrm{LM}}(D) = -\sum_{n=1}^N\sum_{j=1}^{k}\log p_{\mathrm{LM}}(\mathbf{y}_n | \mathbf{c}_{nj}\circ \mathbf{x}_n);\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-22fc7ba6056826e7bfe93fffd6edbfe0_l3.svg "Rendered by QuickLaTeX.com")
![\[p_{\mathrm{LSR}}(\mathbf{c}| \mathbf{x}, \mathbf{y})=\frac{e^{\frac{1}{\tau}p_{\mathrm{LM}}(\mathbf{y}|\mathbf{c}\circ\mathbf{x})}}{\sum_{\mathbf{c}'\in C}e^{\frac{1}{\tau}p_{\mathrm{LM}}(\mathbf{y}| \mathbf{c}'\circ\mathbf{x})}}\approx \frac{e^{\frac{1}{\tau} p_{\mathrm{LM}}(\mathbf{y}|\mathbf{c}\circ\mathbf{x})}}{\sum_{j=1}^ke^{\frac{1}{\tau}p_{\mathrm{LM}}(\mathbf{y}|\mathbf{c}_j\circ\mathbf{x})}},\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-613faab1ea64244f8b4aba49beecaacb_l3.svg "Rendered by QuickLaTeX.com")
 and
and  :
: ![\[\mathcal{L}_{\mathrm{R}}(D) = \mathbb{E}_{D}\left[ \mathrm{KL}\left( p_{\mathrm{R}}\left(\mathbf{c}|\mathbf{x})\middle\| p_{\mathrm{LSR}}\left(\mathbf{c}|\mathbf{x}, \mathbf{y})\right].\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-037806226858a981b086e1e7a23206ec_l3.svg "Rendered by QuickLaTeX.com")



 , where
, where  are sequences of observation-action pairs that describe a trajectory in the reinforcement learning environment, and
are sequences of observation-action pairs that describe a trajectory in the reinforcement learning environment, and  is a probability distribution specifying whether the user preferred
is a probability distribution specifying whether the user preferred  ,
,  , or had an equal preference (uniform
, or had an equal preference (uniform ![\[{\hat p}(i\succ j) = \frac{\gamma_i}{\gamma_i+\gamma_j}\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-e671358b5160c755d46d2fedcc47ac79_l3.svg "Rendered by QuickLaTeX.com")
 . Then Bradley–Terry models provide algorithms to maximize the total likelihood of a dataset with such pairwise comparisons, usually based on minorization-maximization algorithms, a generalization of the basic idea of the EM algorithm (
. Then Bradley–Terry models provide algorithms to maximize the total likelihood of a dataset with such pairwise comparisons, usually based on minorization-maximization algorithms, a generalization of the basic idea of the EM algorithm ( has to be a function of
has to be a function of  ;
; ![\[\gamma(\sigma_i) = e^{\sum_{t=1}^{k_i}{\hat r}(o_{it},a_{it})},\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-8bc0548ded9e42bf4fc3f0269b3a5697_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{L} = -\sum_{(\sigma_1,\sigma_2,\mu)\in D}\left(\mu(1)\log {\hat p}(\sigma_1\succ \sigma_2) + \mu(2)\log {\hat p}(\sigma_2\succ \sigma_1)\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-92370ff76b05eb9381bb82a729079fe1_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathcal{L} = \sum_{(\mathbf{x},\mathbf{y}_1,\mathbf{y}_2,\mu)\in D}\log\left(\sigma\left({\hat r}(\mathbf{x},\mathbf{y}_{\mu}) - {\hat r}(\mathbf{x},\mathbf{y}_{1-\mu})\right)\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-2054cb215a092c59c0f3104d0bd27aaa_l3.svg "Rendered by QuickLaTeX.com")
 and
and  are two summaries of the text
are two summaries of the text  that urges the learned policy
that urges the learned policy  to not differ too significantly from the original supervised model
to not differ too significantly from the original supervised model  , usually in the form of KL divergence between the two:
, usually in the form of KL divergence between the two:![\[{\hat r}'(\mathbf{x},\mathbf{y})={\hat r}(\mathbf{x},\mathbf{y})-\beta \log\left(\pi_{\mathrm{RL}}(\mathbf{y}|\mathbf{x}) / \pi_{\mathrm{SFT}}(\mathbf{y}|\mathbf{x})\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-65ad4cb6835da40e281d50a8ac75c71c_l3.svg "Rendered by QuickLaTeX.com")
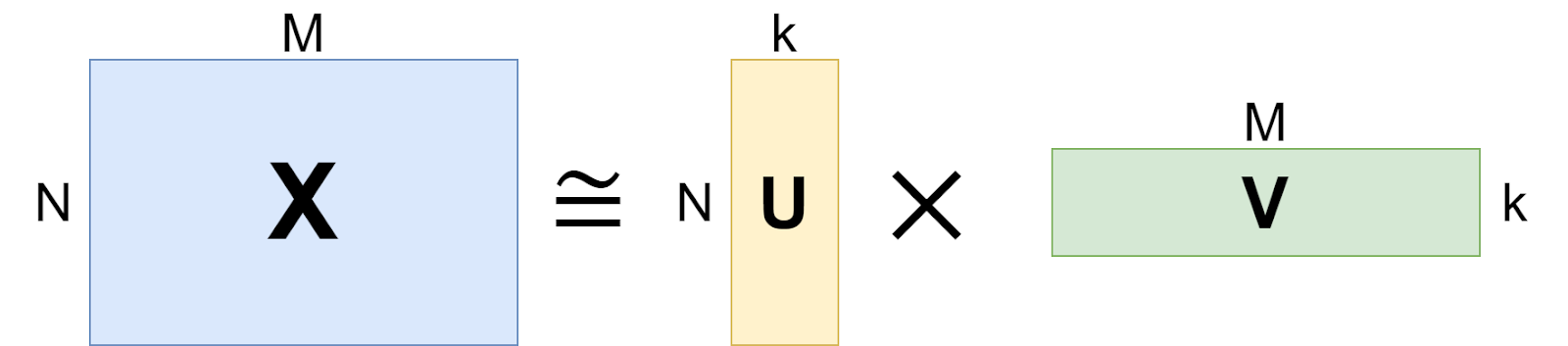
 matrix
matrix  is approximated with a product of two rectangular matrices,
is approximated with a product of two rectangular matrices,![\[\mathbf{X}\approx \mathbf{U}\mathbf{V},\quad\text{where}\quad\mathbf{U}\in\mathbb{R}^{N\times k},\mathbf{V}\in\mathbb{R}^{k\times M}\quad\text{for}\quad k \ll N, M.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-396c80388fc71f3fbb656e3a136ccafa_l3.svg "Rendered by QuickLaTeX.com")
 is, by construction, a matrix of rank
is, by construction, a matrix of rank  and
and  -norm of the difference,
-norm of the difference,  .
. complexity of learning it with the
complexity of learning it with the  complexity of learning the matrices
complexity of learning the matrices  and looks for a
and looks for a  in the form of a low-rank approximation
in the form of a low-rank approximation  , where
, where  ,
,  .
. as the new weight matrix.
as the new weight matrix. since you have to store the
since you have to store the  . You only have to store the base matrix once and store new variations as a collection of different
. You only have to store the base matrix once and store new variations as a collection of different  and
and  , as illustrated below:
, as illustrated below: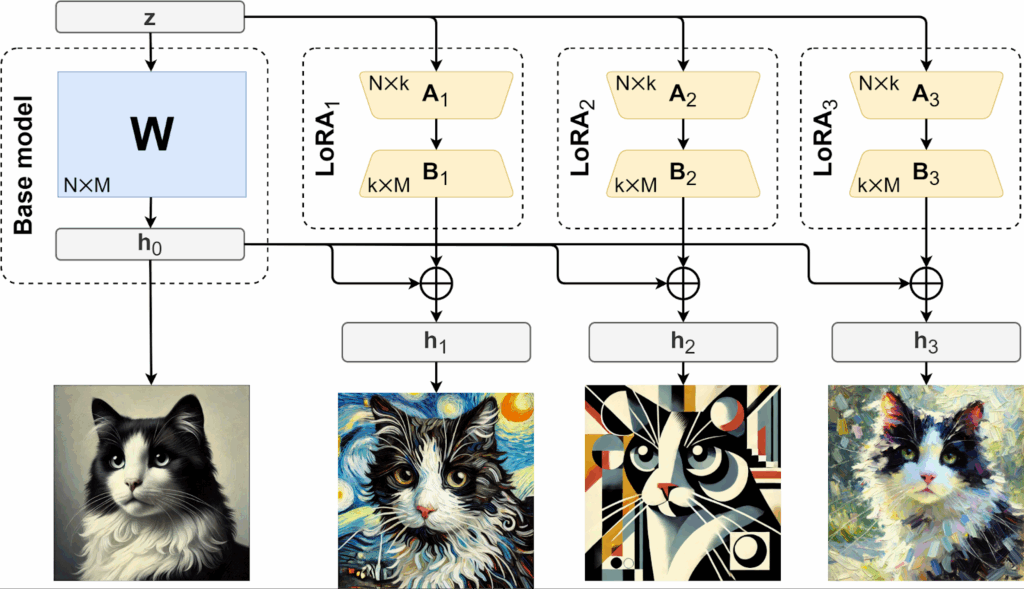
 , where matrices
, where matrices  and
and  are now orthogonal, and
are now orthogonal, and  is a diagonal matrix of singular values; in SVD, the magnitudes of singular values
is a diagonal matrix of singular values; in SVD, the magnitudes of singular values  are representative of the significance of the corresponding additional components in the decomposition, and one can prune singular values of low magnitudes; note, however, that running a full SVD on matrices of size
are representative of the significance of the corresponding additional components in the decomposition, and one can prune singular values of low magnitudes; note, however, that running a full SVD on matrices of size  and
and  to the loss function:
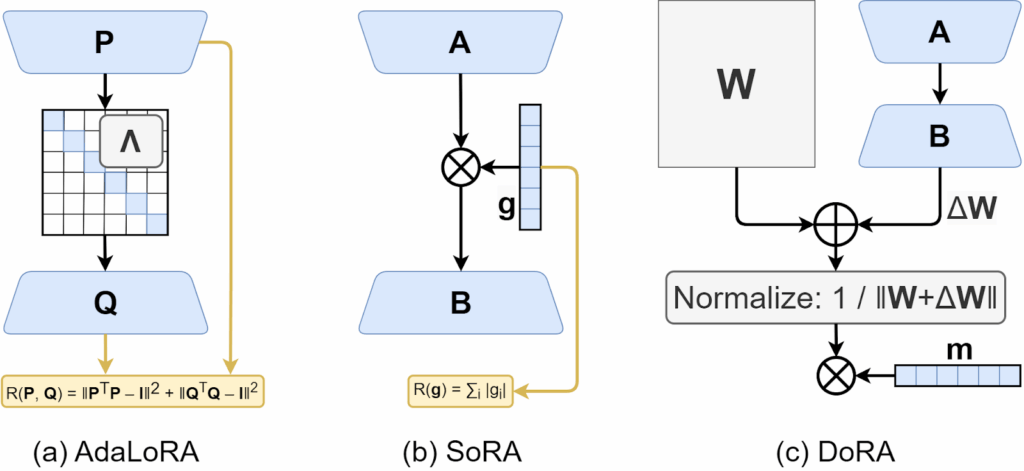
to the loss function: ![\[R(\mathbf{P}, \mathbf{Q}) = \left\|\mathbf{P}^\top\mathbf{P} - \mathbf{I}\right\|^2 + \left\|\mathbf{Q}^\top\mathbf{Q} - \mathbf{I}\right\|^2;\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-c10b9de4a6fda0d135ca4ee6283fef46_l3.svg "Rendered by QuickLaTeX.com")
 serves as a gating mechanism for rows and columns of
serves as a gating mechanism for rows and columns of ![\[\Delta\mathbf{W}\mathbf{x} = \mathbf{B}\cdot\left(\mathbf{g}\odot\left(\mathbf{A}\cdot \mathbf{x}\right)\right),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-2bd17e7a259f4f0c304da495def5af8e_l3.svg "Rendered by QuickLaTeX.com")
 with a sparsity-inducing
with a sparsity-inducing  regularizer;
regularizer; decomposition is done separately for different weight matrices in the network, and ranks may differ across them;
decomposition is done separately for different weight matrices in the network, and ranks may differ across them; , and LoRa is applied only to the directional part:
, and LoRa is applied only to the directional part: ![\[W' = \|W\|\cdot \left(\frac{W}{\|W\|} + \Delta W\right);\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-295ea9a223e8b890f5a7ee9faf9d0ad5_l3.svg "Rendered by QuickLaTeX.com")
 , we want to maximize its likelihood
, we want to maximize its likelihood![\[L(\boldsymbol{\theta}|X) = p(X | \boldsymbol{\theta}) = \prod_{n=1}^Np(\mathbf{x}_n|\boldsymbol{\theta}).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-f8fd52f9829b01a09bc728f3f0737f45_l3.svg "Rendered by QuickLaTeX.com")
 is a complicated model (a mixture of Gaussians, for instance), and to get back to a simpler model you need to know some latent variable
is a complicated model (a mixture of Gaussians, for instance), and to get back to a simpler model you need to know some latent variable  for every
for every  is simple but
is simple but  , that would be actually tractable; maximizing the lower bound turns out to be equivalent to maximizing
, that would be actually tractable; maximizing the lower bound turns out to be equivalent to maximizing![\[Q(\boldsymbol{\theta},\boldsymbol{\theta}^{(n)}) = \mathbb{E}\left[\log p(X, Z|\boldsymbol{\theta}) \middle| X, \boldsymbol{\theta}^{(n)}\right].\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-6a481a597af9090281338b556814bca3_l3.svg "Rendered by QuickLaTeX.com")
 but only about the much simpler distribution
but only about the much simpler distribution  ; this is the main goal here. The expectation looks complicated but in most actual cases, it just boils down to computing the expected values of the
; this is the main goal here. The expectation looks complicated but in most actual cases, it just boils down to computing the expected values of the  . So while formally the EM algorithm is just repeating the single step of maximizing
. So while formally the EM algorithm is just repeating the single step of maximizing  and repeating with the new
and repeating with the new  until convergence, in reality this maximization usually breaks down into two separate steps that gave the algorithm its name:
until convergence, in reality this maximization usually breaks down into two separate steps that gave the algorithm its name:![\mathbb{E}[\mathbf{z}]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-a69df7bea92e802907f9ff98ced1098c_l3.svg "Rendered by QuickLaTeX.com") ;
; and maximizes the result with respect to
and maximizes the result with respect to  then the procedure is repeated with the new value of
then the procedure is repeated with the new value of 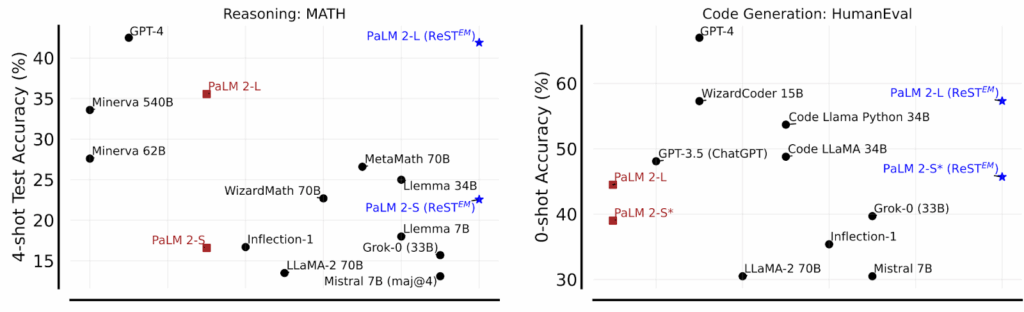
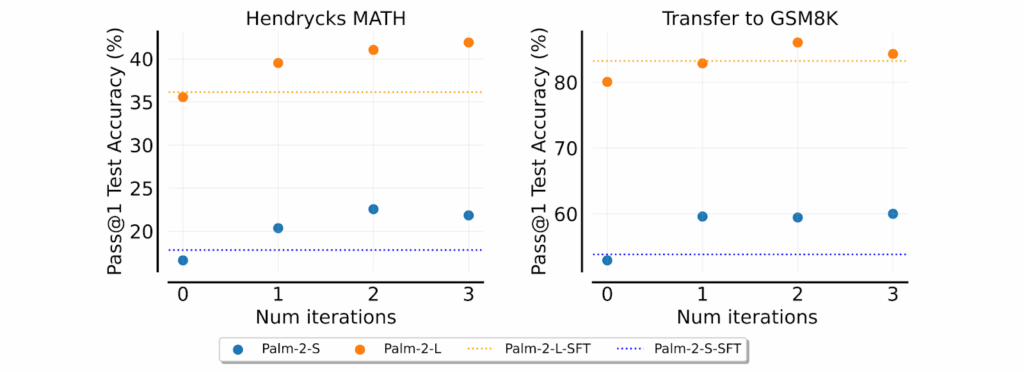
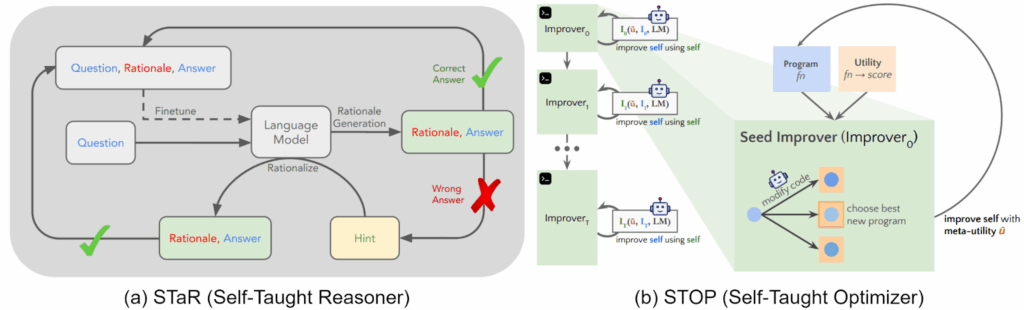



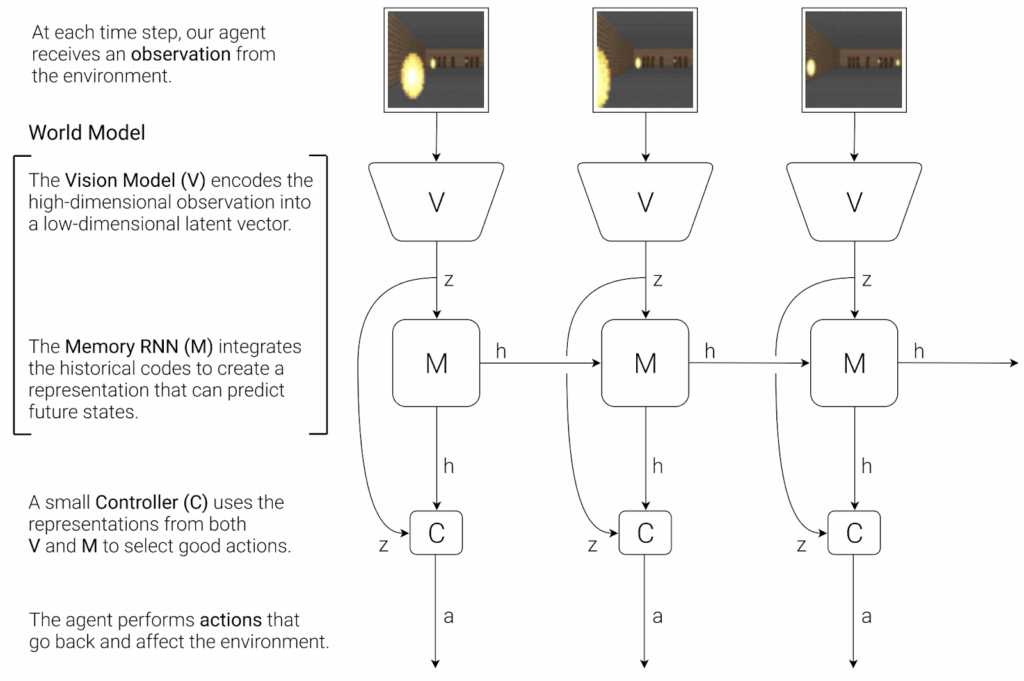
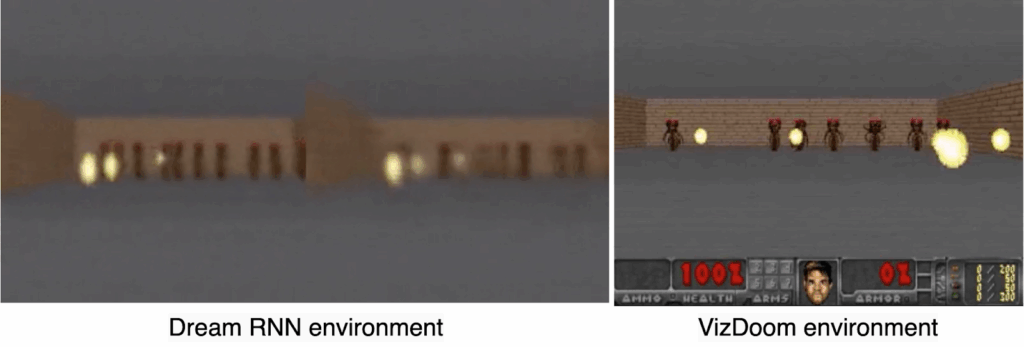
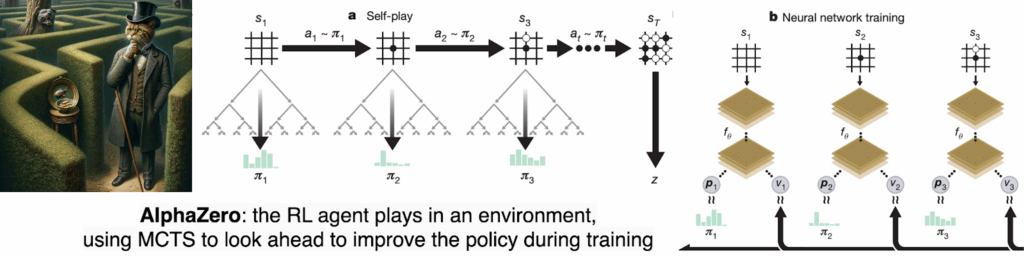
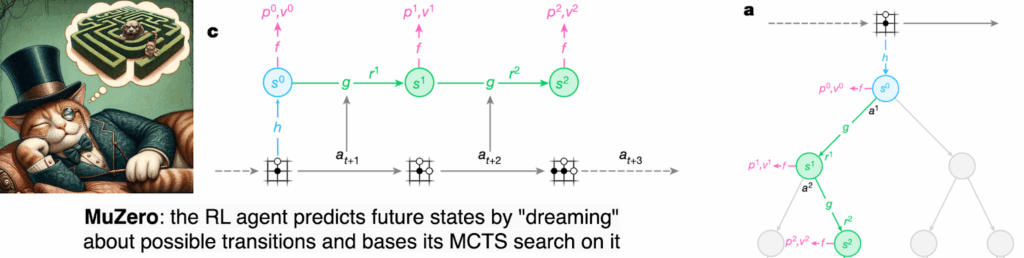




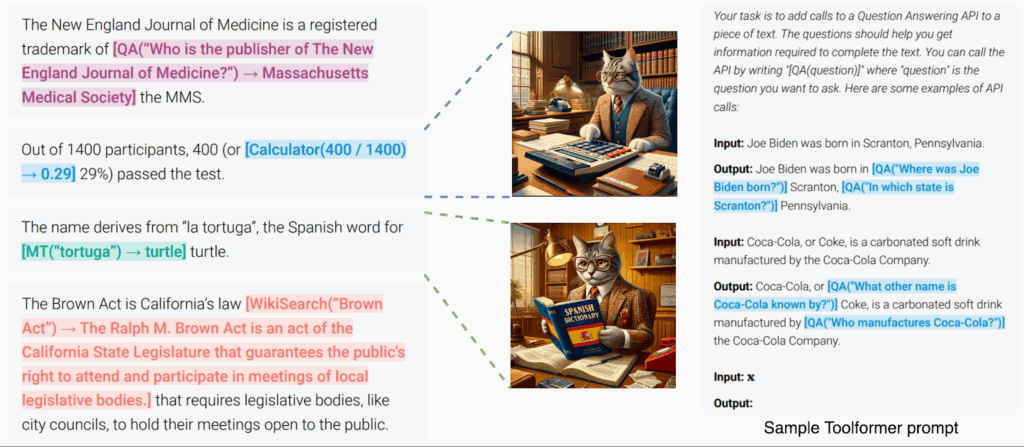
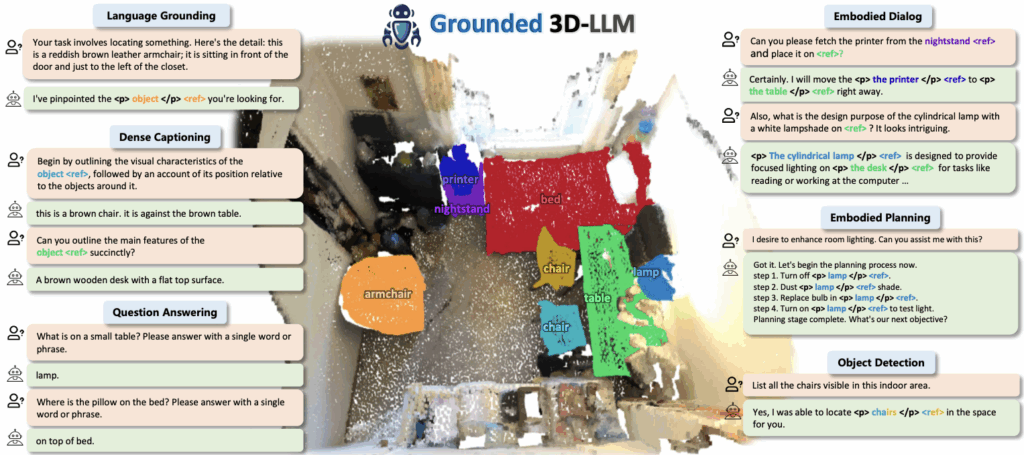
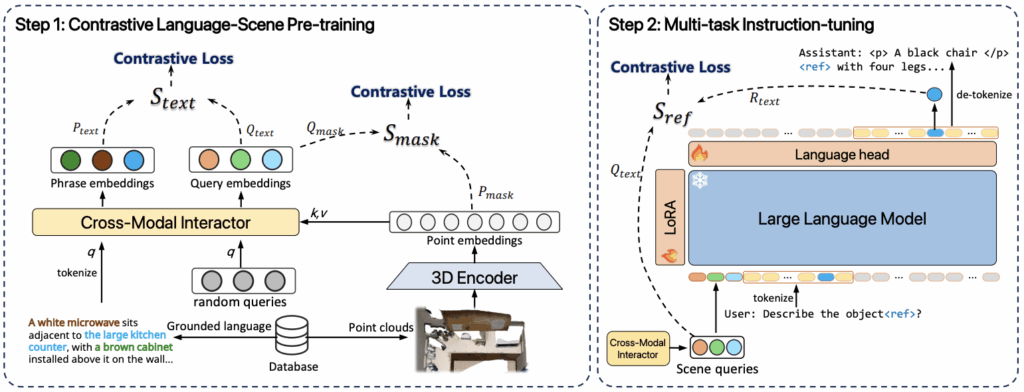
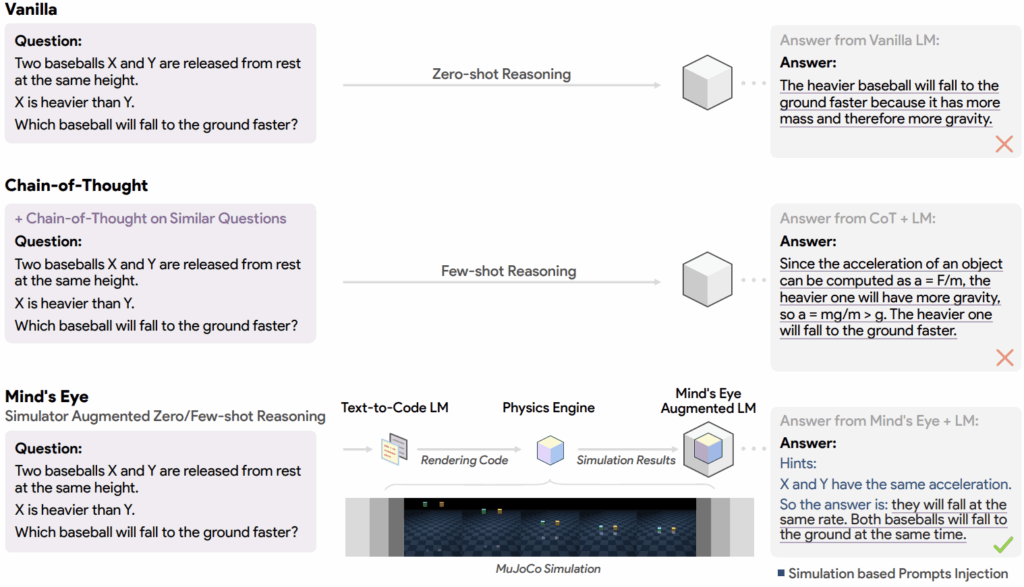
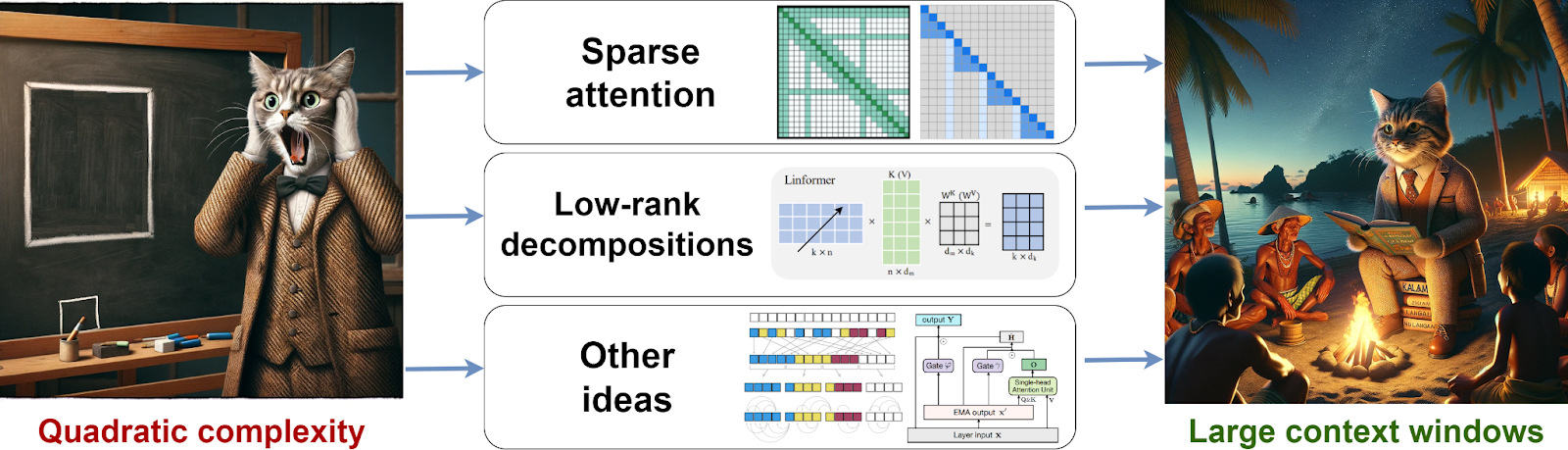
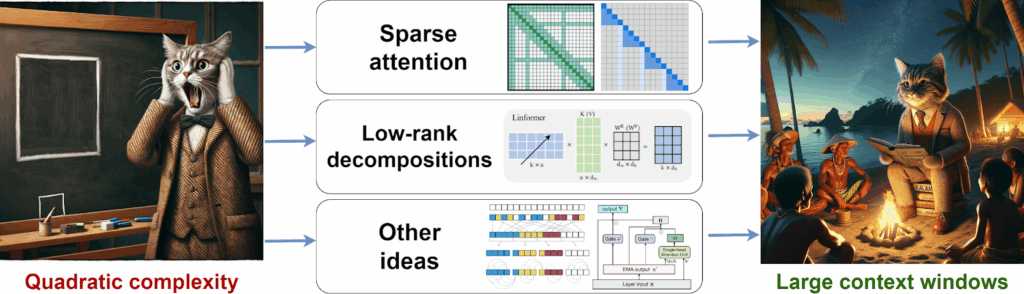
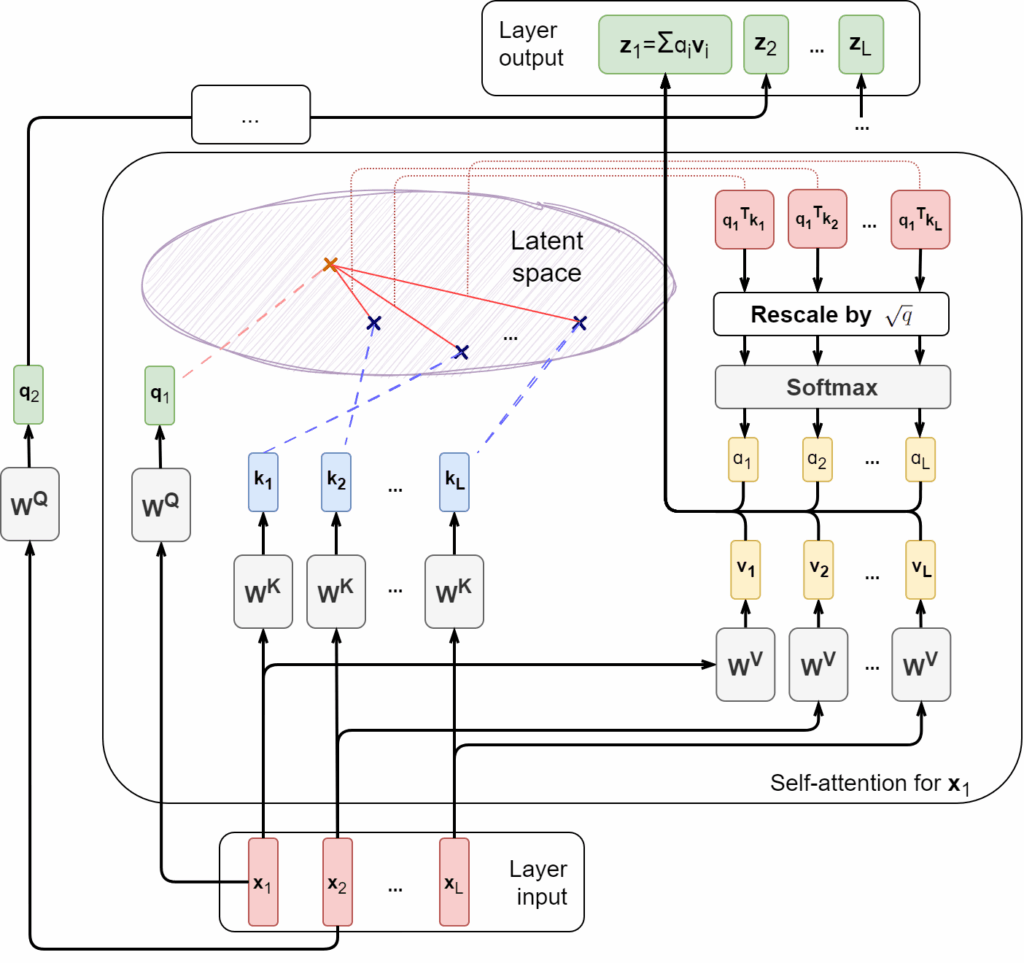
![\[\mathrm{Attention}(\mathbf{Q},\mathbf{K},\mathbf{V}) = \mathrm{softmax}\left(\frac{1}{\sqrt{q}}\mathbf{Q}\mathbf{K}^\top\right)\mathbf{V}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-d9de051c2227d1a5de611a28168f2c79_l3.svg "Rendered by QuickLaTeX.com")
![\[\alpha_{ij} = \mathrm{softmax}\left(\frac{1}{\sqrt{q}}\mathbf{q}_i\mathbf{K}^\top\right)_j,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-6c6e862b009fbd5238fa642de5b5bbaa_l3.svg "Rendered by QuickLaTeX.com")
 where
where 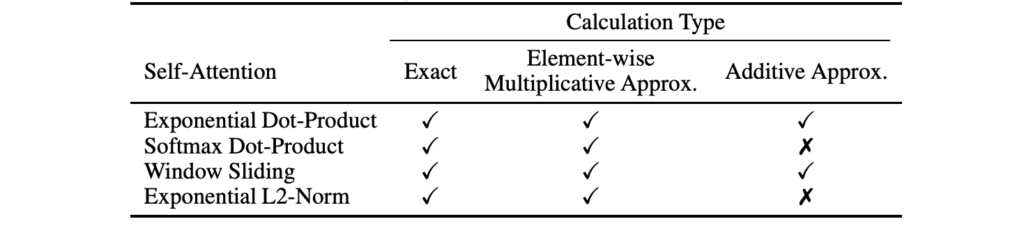
 complexity in the worst case and even long multiplication of two n-bit numbers has quadratic complexity (quadratic in total input size, of course, which is logarithmic in the values of the numbers themselves).
complexity in the worst case and even long multiplication of two n-bit numbers has quadratic complexity (quadratic in total input size, of course, which is logarithmic in the values of the numbers themselves). algorithms for sorting. Multiplication has been done with Karatsuba’s algorithm in time
algorithms for sorting. Multiplication has been done with Karatsuba’s algorithm in time  since the 1960s, and a recent highly acclaimed result by
since the 1960s, and a recent highly acclaimed result by  , where
, where  since now we compute only r attention weights around each of L input tokens;
since now we compute only r attention weights around each of L input tokens; sequential steps from one side of the input sequence to the other.
sequential steps from one side of the input sequence to the other.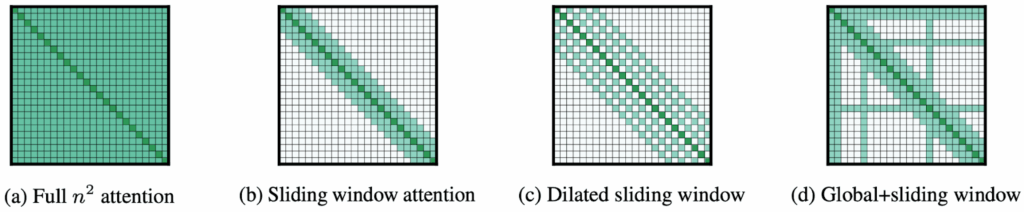
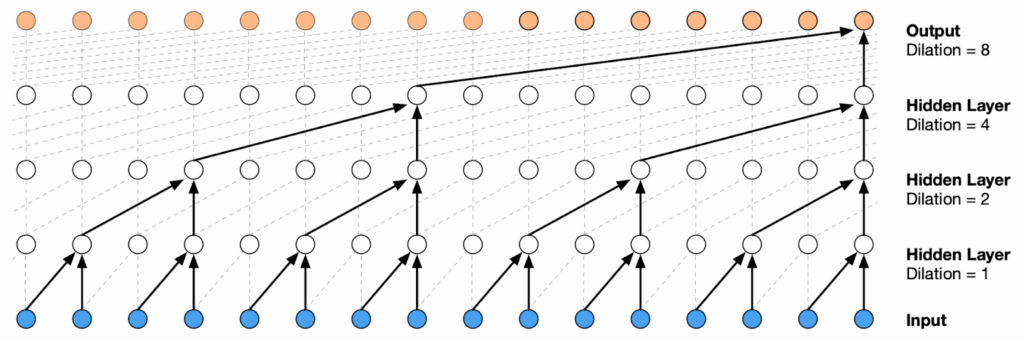
 of input tokens that it attends to. At the same time, Child et al. require that the factorization into
of input tokens that it attends to. At the same time, Child et al. require that the factorization into  , which is obviously minimal since you need to get to L in p steps. Specifically, they build upon the natural general idea for such a factorization: one head attends to l sequential locations, and the other head uses a kind of dilated sliding window with stride l, where l is close to
, which is obviously minimal since you need to get to L in p steps. Specifically, they build upon the natural general idea for such a factorization: one head attends to l sequential locations, and the other head uses a kind of dilated sliding window with stride l, where l is close to  .
.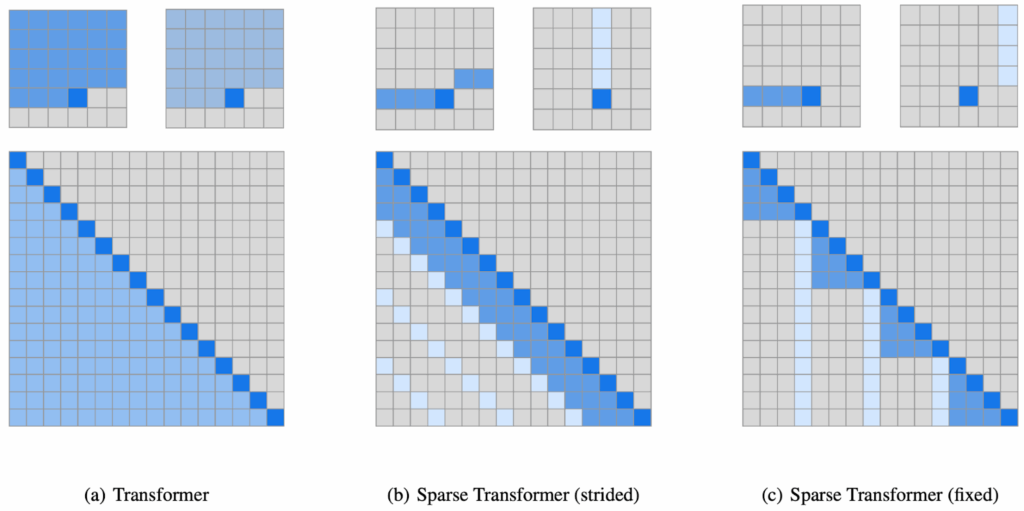
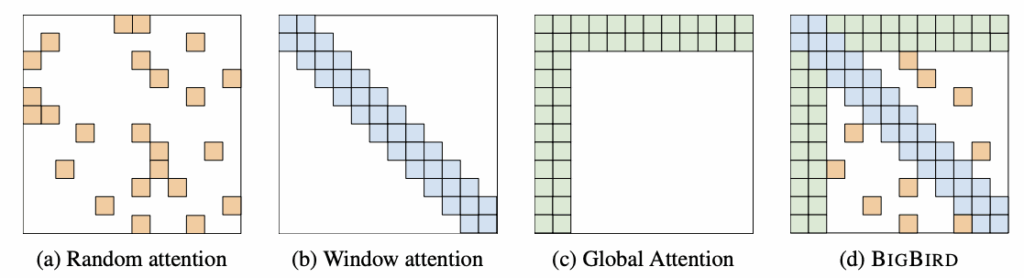
 (denoted U below) and another or size
(denoted U below) and another or size  (denoted V):
(denoted V):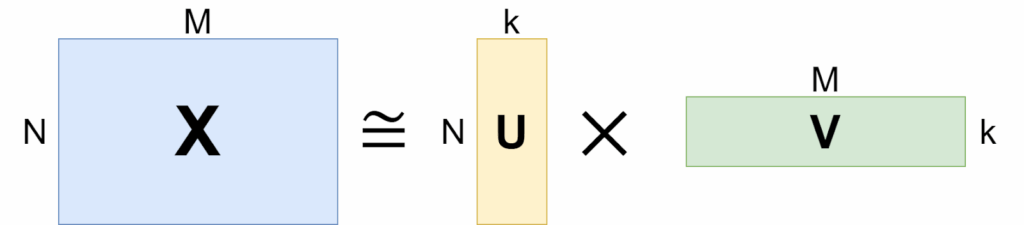
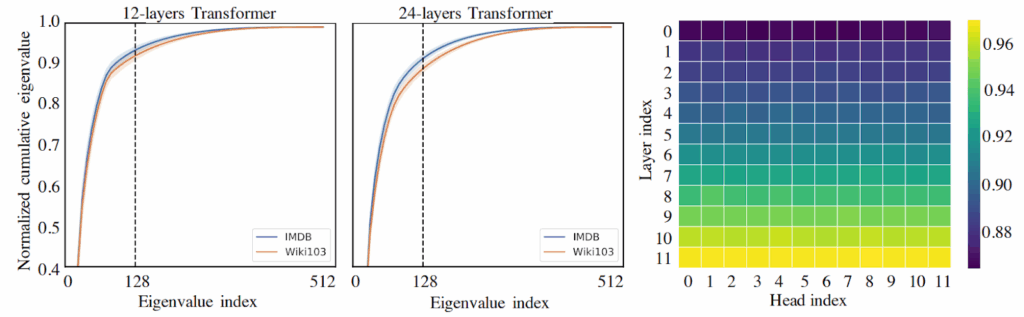
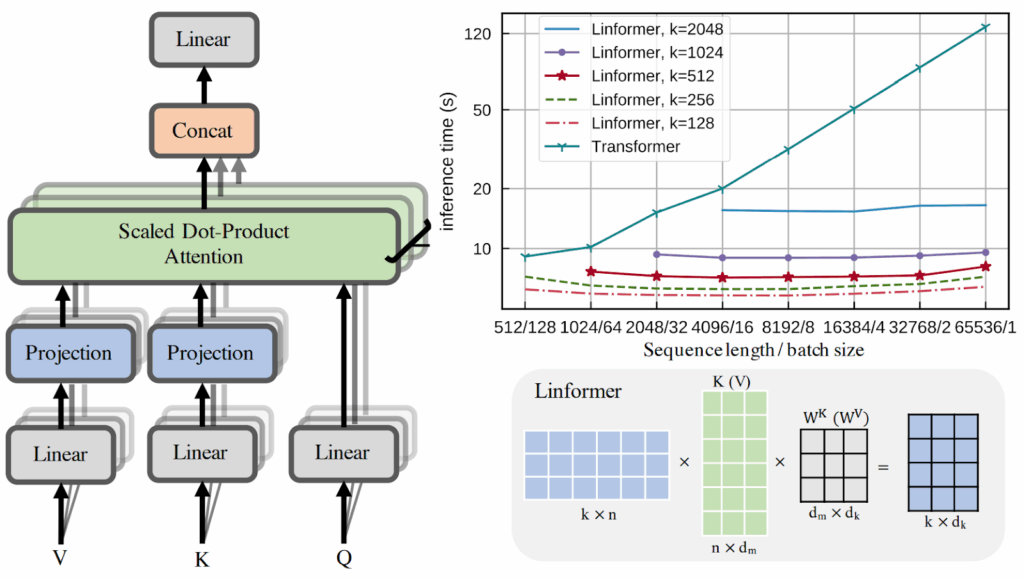
 matrices but no
matrices but no  matrices:
matrices:![\[\mathrm{head}_i=\mathrm{softmax}\left(\frac{1}{\sqrt{d_k}}\mathbf{Q}\mathbf{W}_i^Q\left(\mathbf{E}_i\mathbf{K}\mathbf{W}_i^K\right)^\top\right)\cdot\left(\mathbf{F}_i\mathbf{V}\mathbf{W}_i^V\right),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-96b7aea8a7a65fc83d1843f1cb101bfe_l3.svg "Rendered by QuickLaTeX.com")
 and
and  are
are  matrix of attention weights and a
matrix of attention weights and a  projected matrix of values.
projected matrix of values.![\[\mathbf{A}=\left(\frac{1}{\sqrt{d_k}}\mathbf{Q}\mathbf{K}^\top\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-1af2842ccc849c4d99786c5a99ad0a9c_l3.svg "Rendered by QuickLaTeX.com")
![\[A_{i,j} = K(\mathbf{q}_i, \mathbf{k}_j),\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-ec31a34eee2d186d12299ae64f7af37e_l3.svg "Rendered by QuickLaTeX.com")
 is a kernel function
is a kernel function  . For Transformer self-attention,
. For Transformer self-attention,  ,
,  , and in expectation
, and in expectation ![\[K(\mathbf{x},\mathbf{y}) = \mathbb{E}\left[\phi(\mathbf{x})^\top \phi(\mathbf{y})\right].\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-e3ef7348215306dca40773b7a864681c_l3.svg "Rendered by QuickLaTeX.com")
 matrix of dot products of vectors of length
matrix of dot products of vectors of length  and then multiply it by an
and then multiply it by an  matrix on the left.
matrix on the left. and
and  are
are 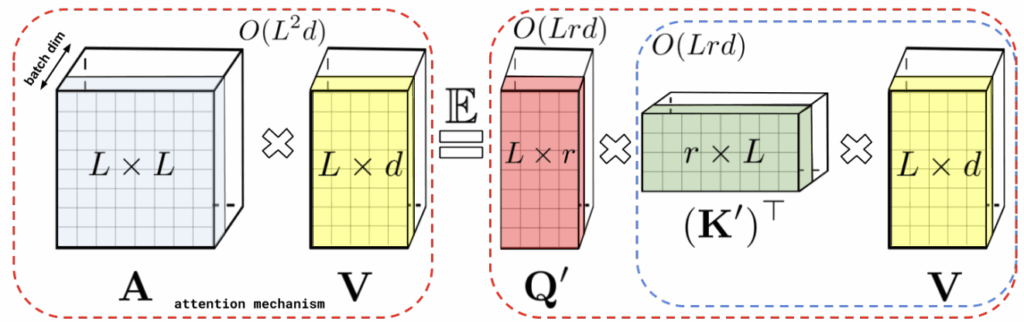
 matrices in the reduced dimension. In the next section, we will consider a couple of ideas that are different and do not fall neatly into the categories of either sparse attention or low-rank decompositions.
matrices in the reduced dimension. In the next section, we will consider a couple of ideas that are different and do not fall neatly into the categories of either sparse attention or low-rank decompositions.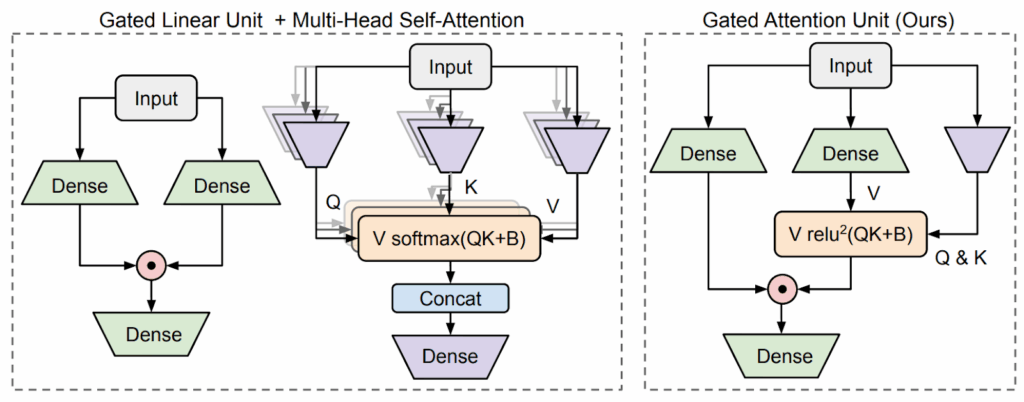
 . Hua et al. show that after this modification, you can replace softmax with ReLU and also simplify the computation of Q and K matrices; please see
. Hua et al. show that after this modification, you can replace softmax with ReLU and also simplify the computation of Q and K matrices; please see ![\[\mathrm{Attention}(\mathbf{Q},\mathbf{K},\mathbf{V}) = \mathrm{softmax}\left(\frac{1}{\sqrt{d_k}}\mathbf{Q}\mathbf{K}^\top\right)\mathbf{V}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-3e5c930bddde6b75ada354c4738f7cdb_l3.svg "Rendered by QuickLaTeX.com")
![\[\mathrm{Attention}_{\mathrm{linear}}(\mathbf{Q},\mathbf{K},\mathbf{V}) = \mathbf{Q}\left(\mathbf{K}^\top\mathbf{V}\right).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-3d1efc7de8575b5630c6af28ec15e840_l3.svg "Rendered by QuickLaTeX.com")
 matrix in brackets is a
matrix in brackets is a  matrix, and there is no quadratic dependency on the input length
matrix, and there is no quadratic dependency on the input length  incrementally, step by step: for every new input at time
incrementally, step by step: for every new input at time ![\[\mathbf{M}_t = \mathbf{M}_{t-1} + \mathbf{K}_t^\top\mathbf{V}_t,\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-2e640d86c33b3401a52b2821fb544efc_l3.svg "Rendered by QuickLaTeX.com")
 and add new values as they arrive. Here is how Hua et al. illustrate this; the left side of the picture above contrasts quadratic attention and linear attention:
and add new values as they arrive. Here is how Hua et al. illustrate this; the left side of the picture above contrasts quadratic attention and linear attention: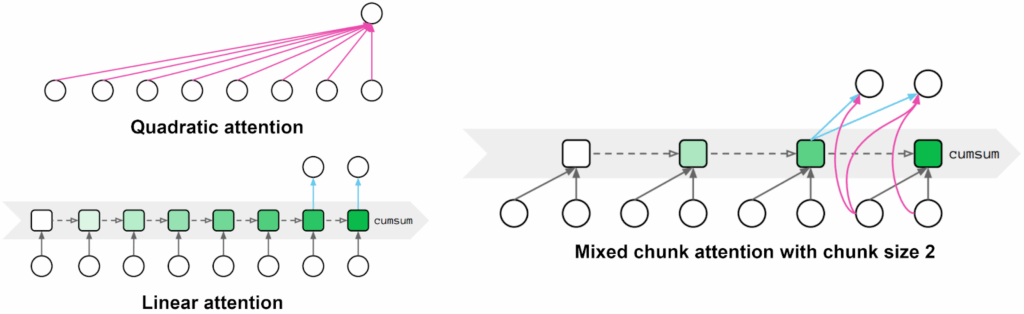
![\[y_t = \alpha x_t + (1-\alpha) y_{t-1}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-6998d6e2adaaef6d98de452b5a1cd533_l3.svg "Rendered by QuickLaTeX.com")
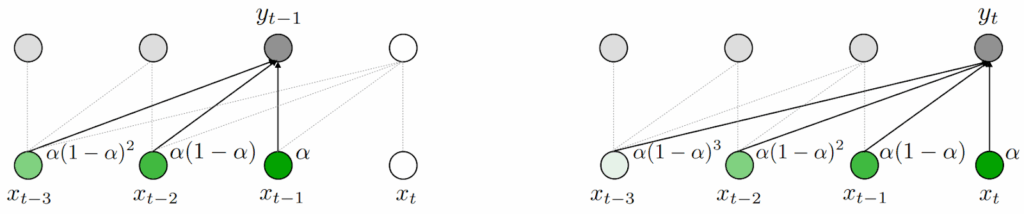
 controls how long you want this memory to be. This is a classical trick known for centuries, so how do we apply it to the Transformer architecture? Here is the general overview from
controls how long you want this memory to be. This is a classical trick known for centuries, so how do we apply it to the Transformer architecture? Here is the general overview from 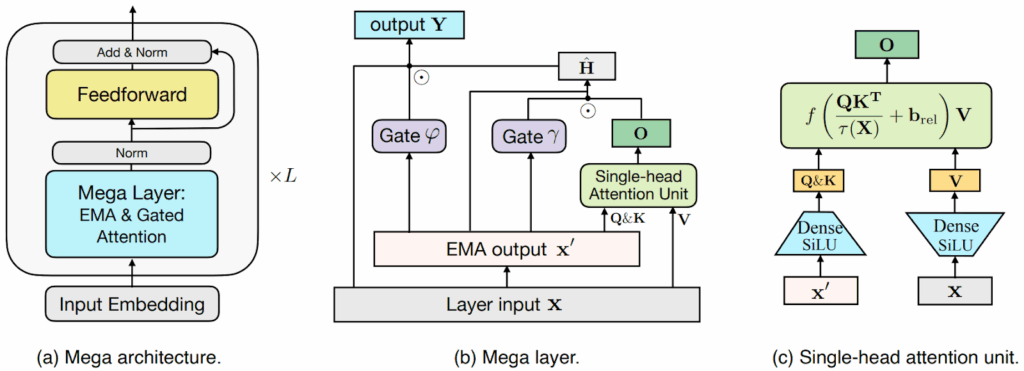
 matrix, is expanded into
matrix, is expanded into  dimensions via a
dimensions via a  expansion matrix
expansion matrix  :
: ![\[\mathbf{u}^{(j)}_t=\boldsymbol{\beta}_j\mathbf{x}_{t,j};\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-ce52c83107c7e81319f0c66db633007a_l3.svg "Rendered by QuickLaTeX.com")
 :
: ![\[\mathbf{h}_t^{(j)} = \boldsymbol{\alpha}_j\odot \mathbf{u}_t^{(j)}+(1 - \boldsymbol{\alpha}_j\odot \boldsymbol{\delta}_j)\odot \mathbf{h}_{t-1}^{(j)};\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-567afd985217685f9abd7278928d0101_l3.svg "Rendered by QuickLaTeX.com")
 :
: ![\[\mathbf{y}_{t,j}=\boldsymbol{\eta}_j^\top\mathbf{h}_t^{(j)}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-5d5298203113064089089eccc5cc5ddb_l3.svg "Rendered by QuickLaTeX.com")
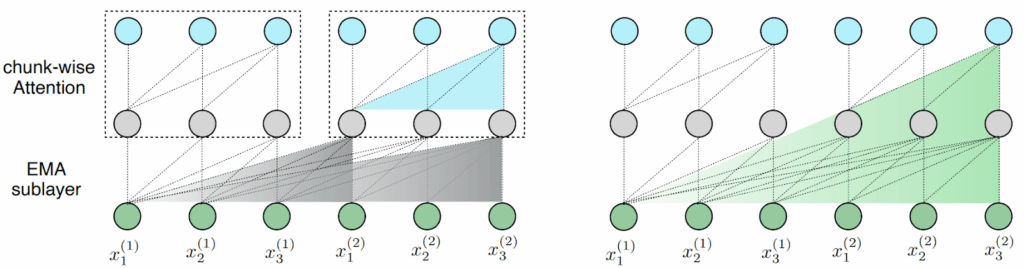
 , only in
, only in  , and the results of a softmax function are dominated by a few largest elements, while the smaller elements have negligible influence on the result. If we have something like 64000 different keys, for each query
, and the results of a softmax function are dominated by a few largest elements, while the smaller elements have negligible influence on the result. If we have something like 64000 different keys, for each query  it would be enough to consider only 32 or 64 keys
it would be enough to consider only 32 or 64 keys  nearest to
nearest to 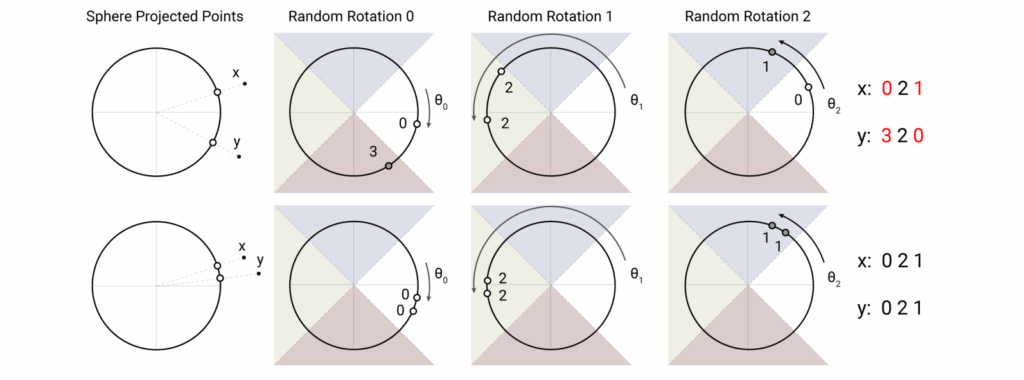
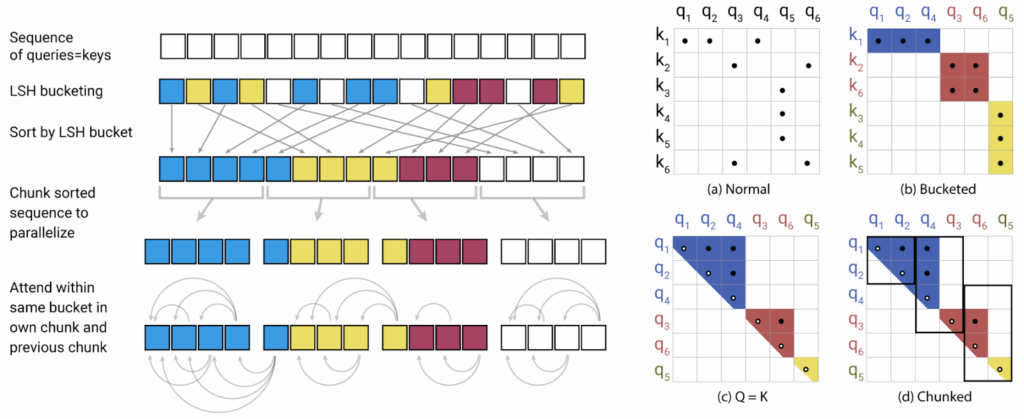
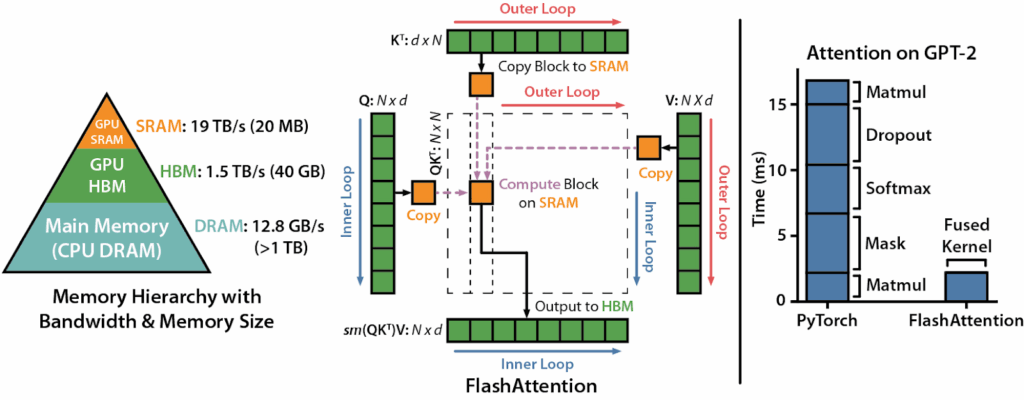
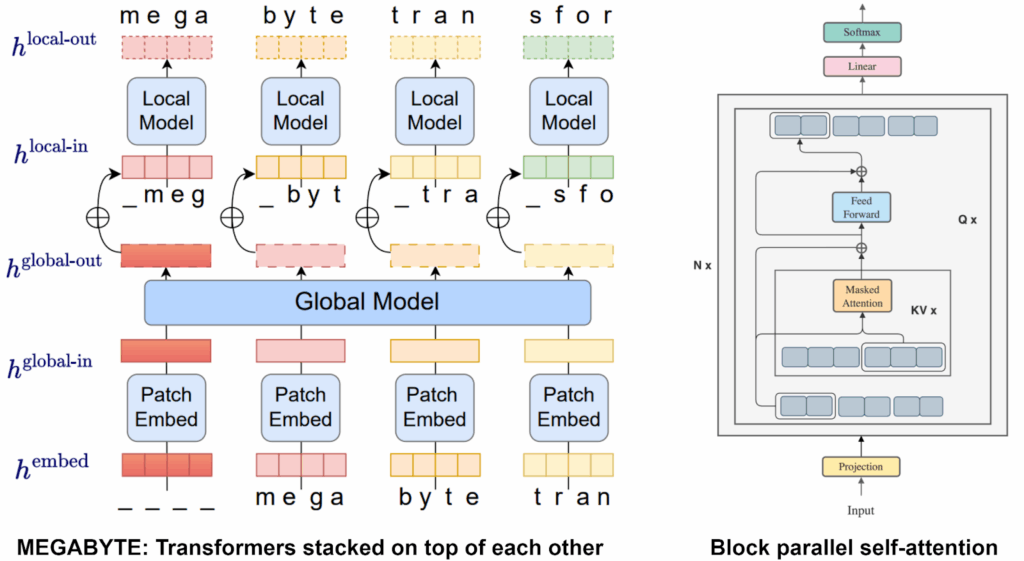
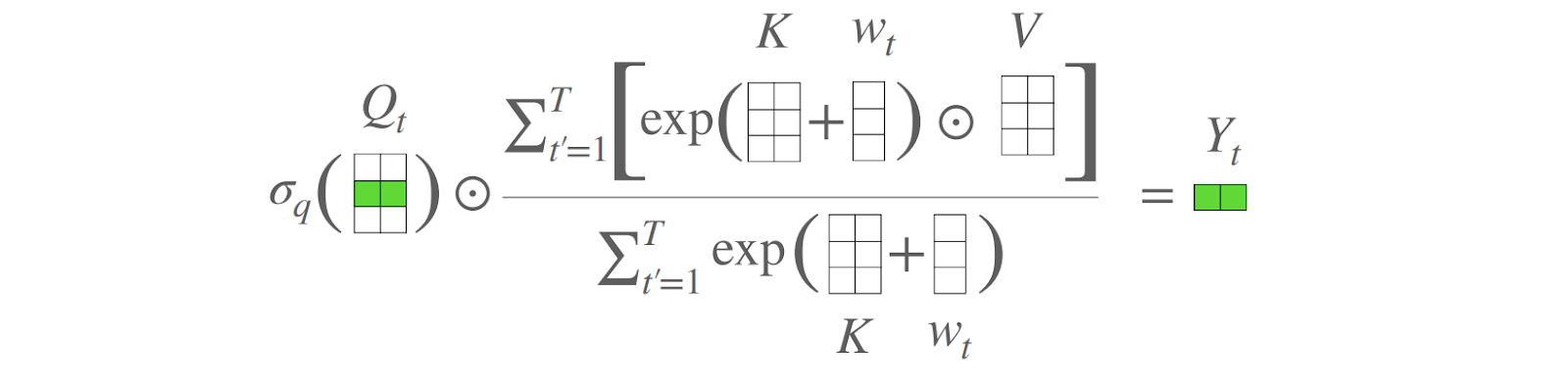
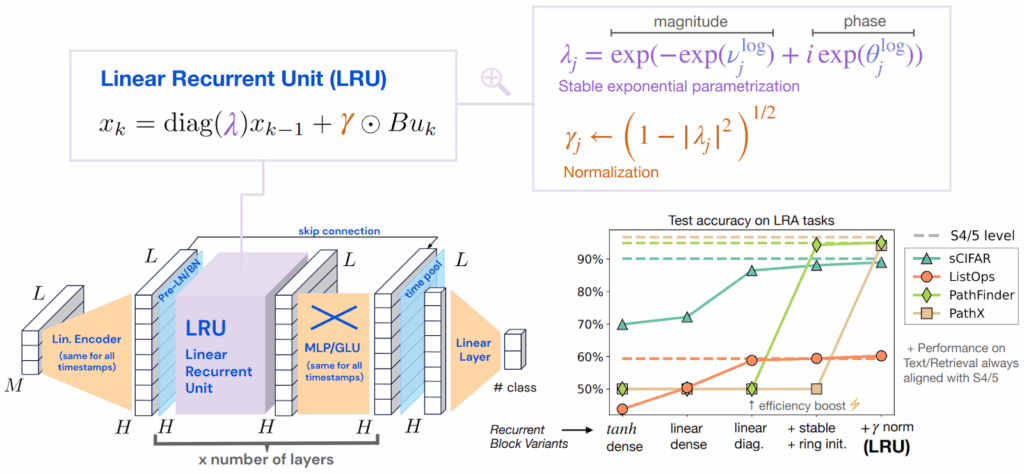
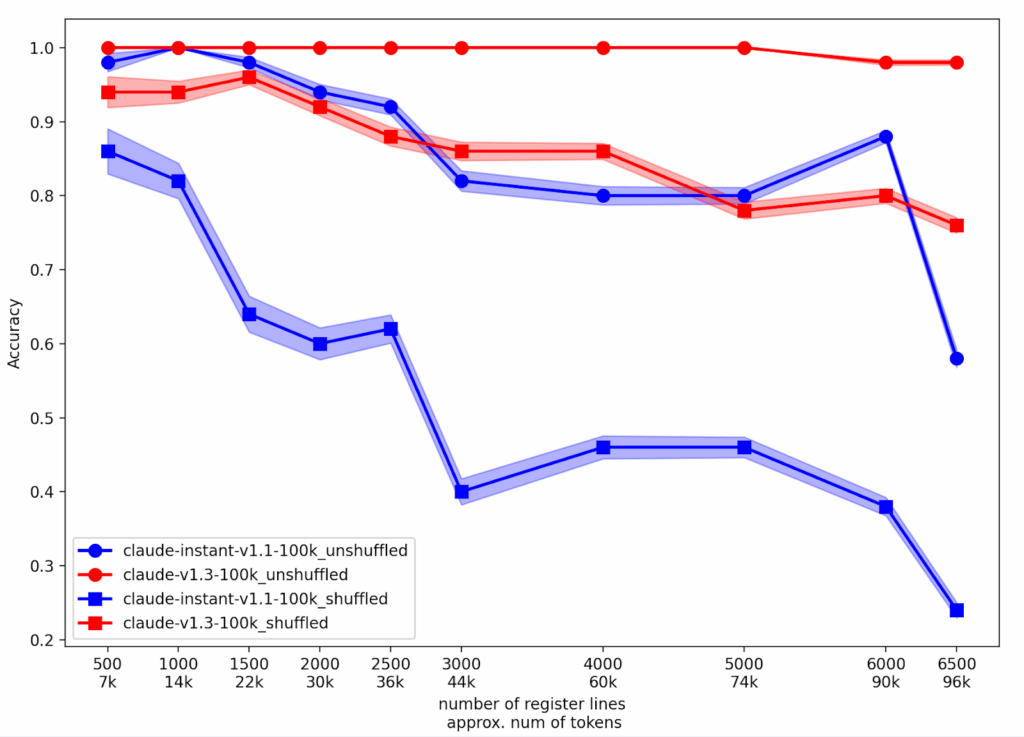
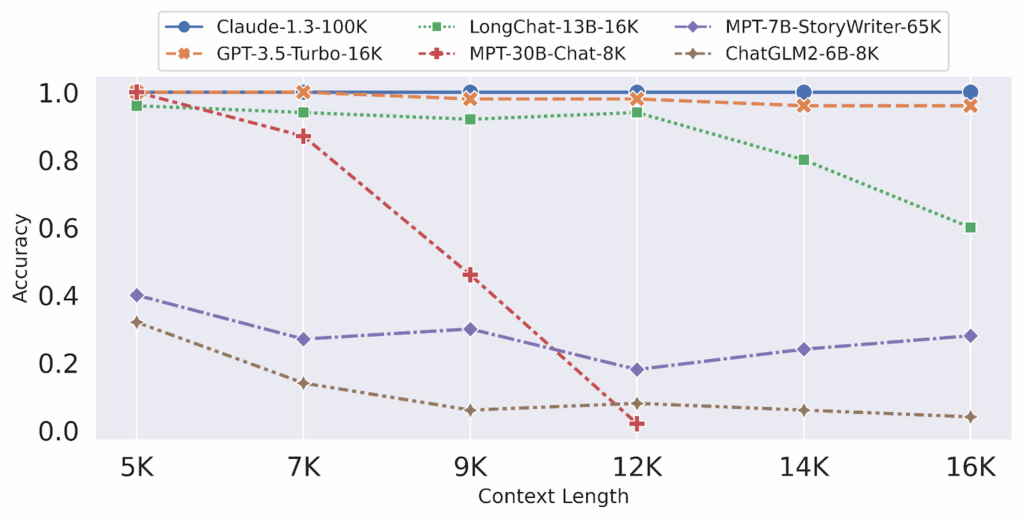
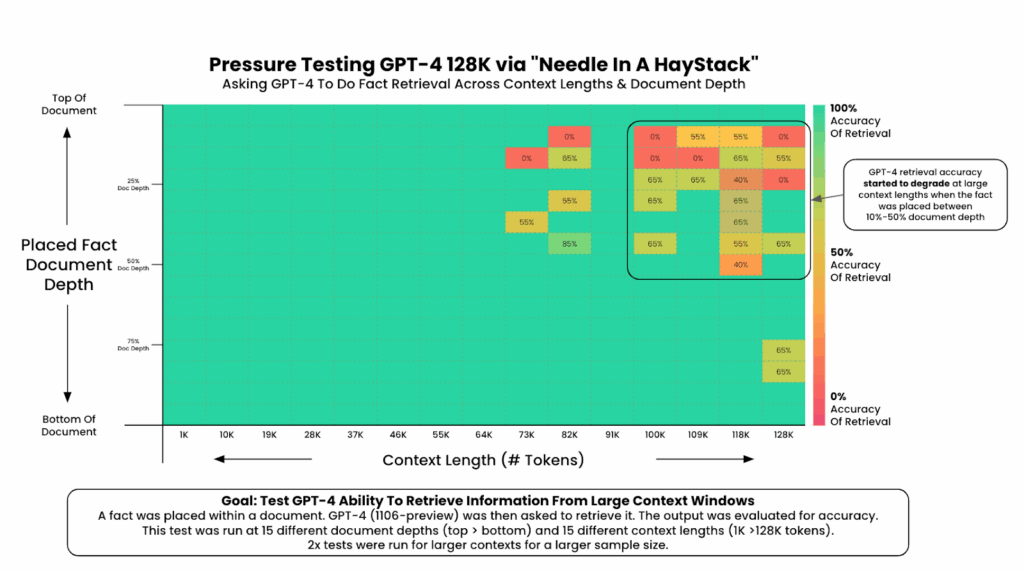
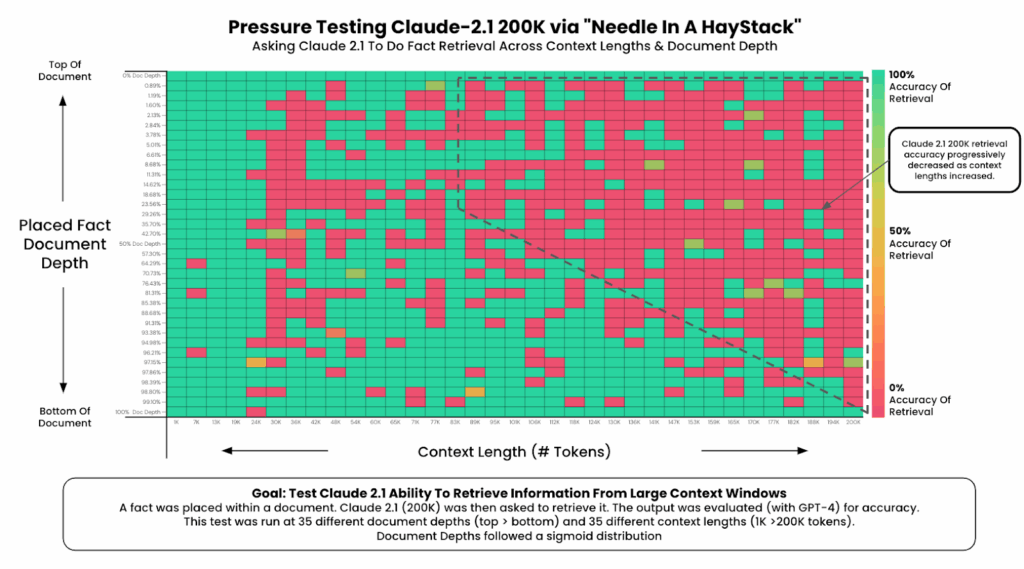
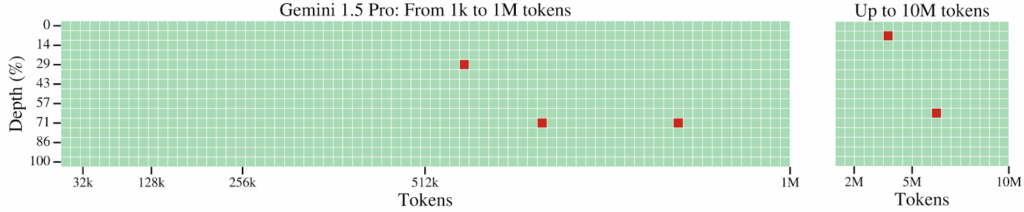
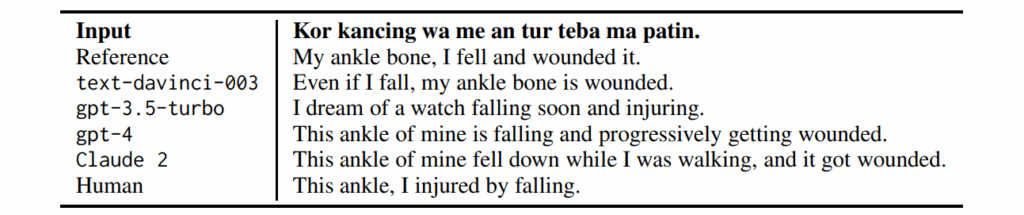
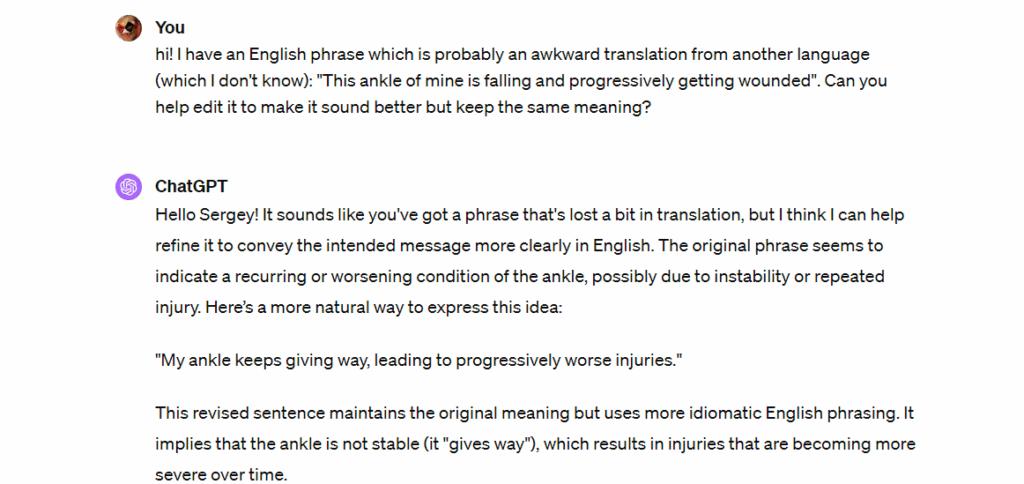

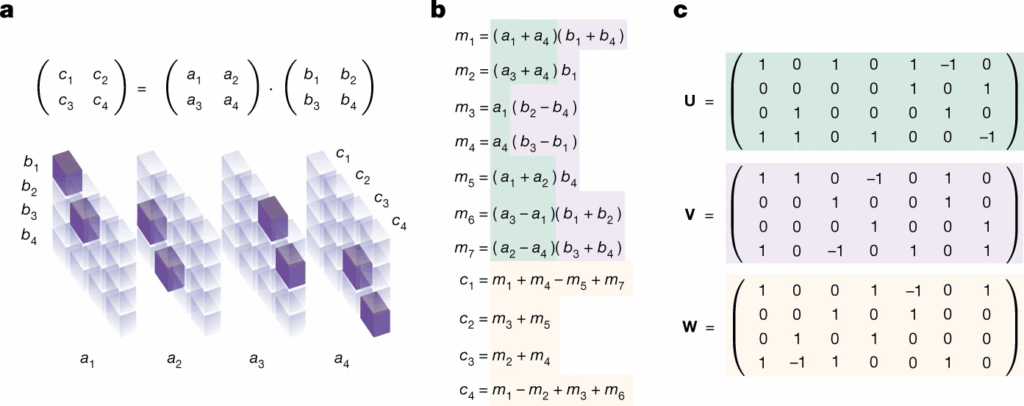
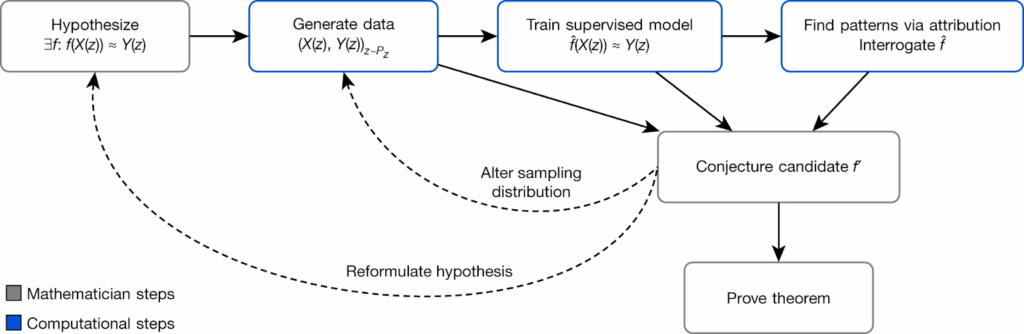
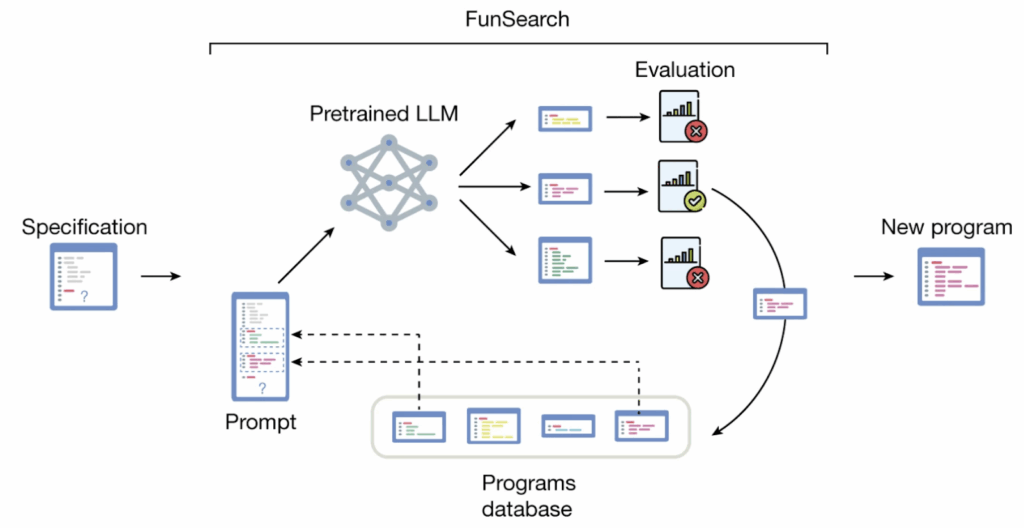
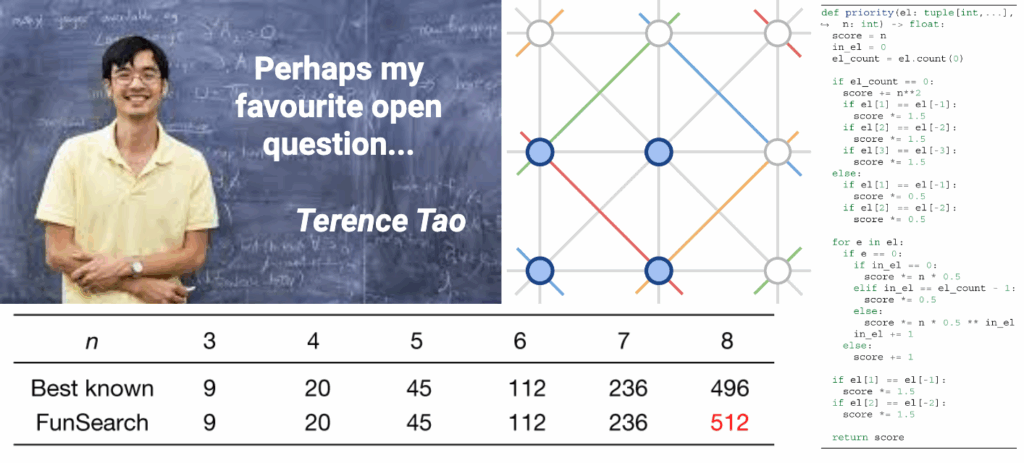
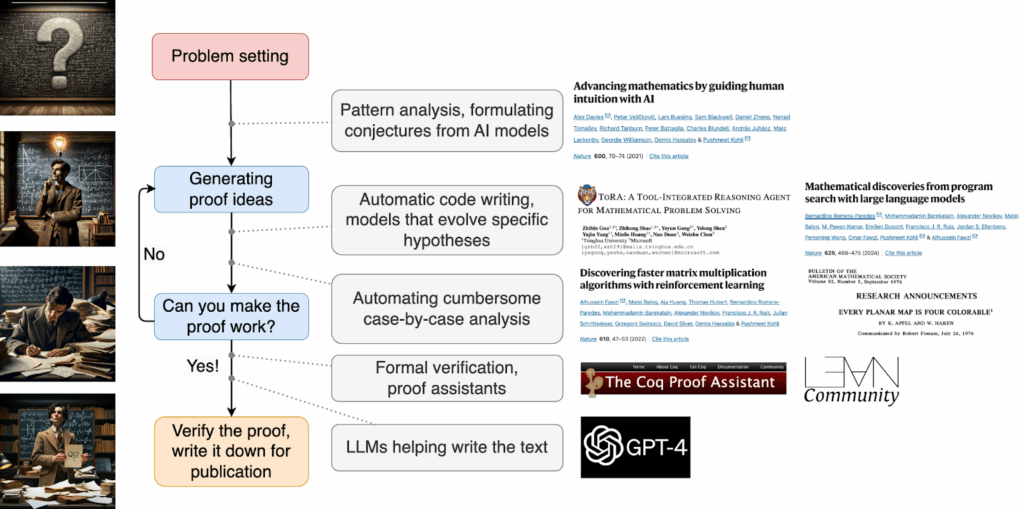


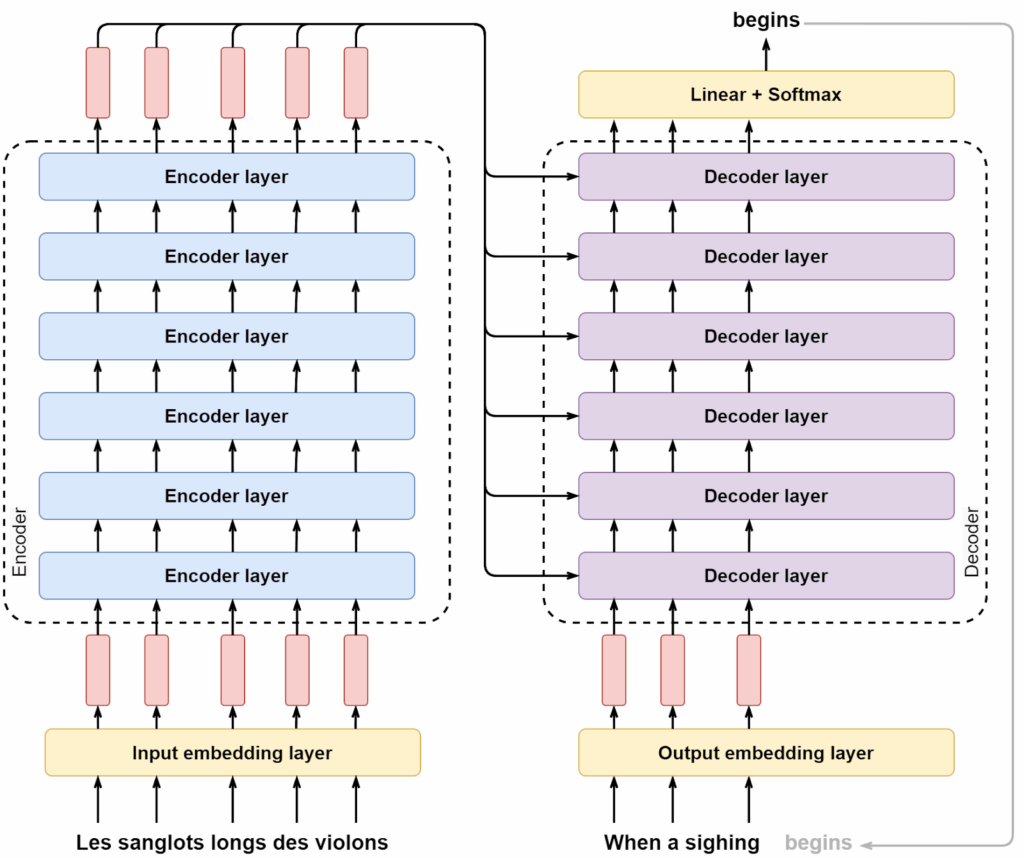
 , an encoder layer first puts them through a self-attention layer followed by layer normalization, modifies the result with a feedforward layer, and outputs the resulting vectors
, an encoder layer first puts them through a self-attention layer followed by layer normalization, modifies the result with a feedforward layer, and outputs the resulting vectors  to the next encoder layer;
to the next encoder layer; , and the decoding process can begin again, autoregressively.
, and the decoding process can begin again, autoregressively.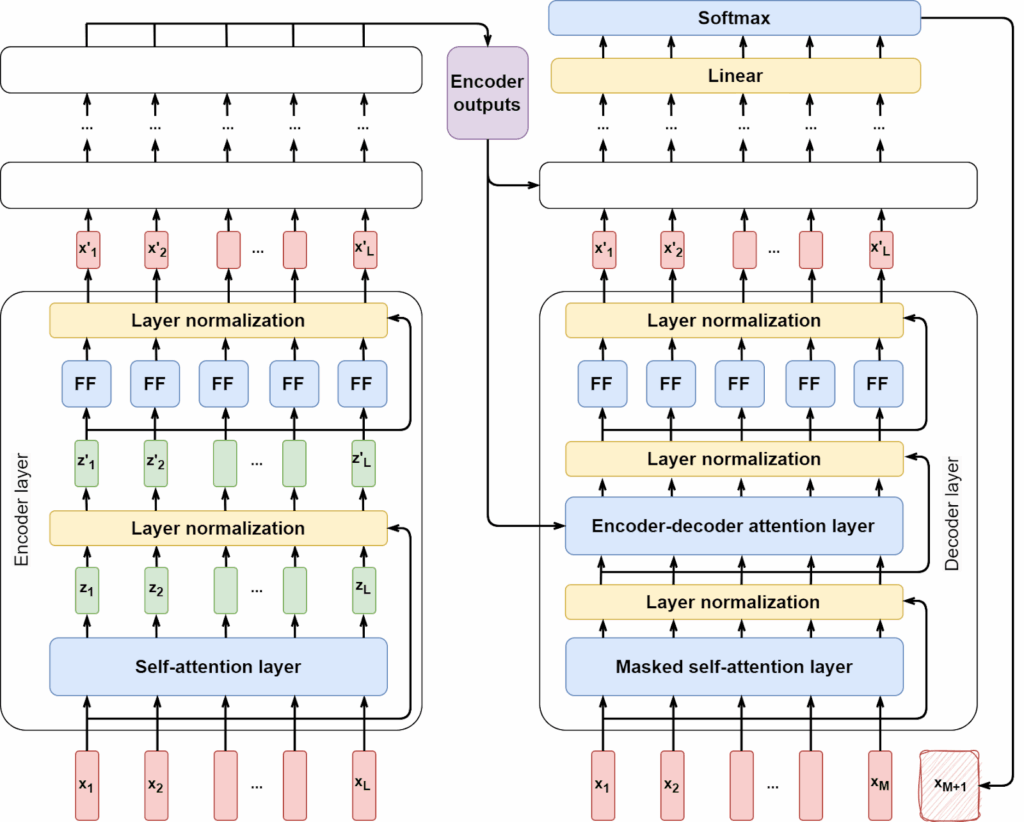
 , where
, where  is the matrix of the self-attention results
is the matrix of the self-attention results  . A feedforward layer is just a single layer of weights applied to the vectors
. A feedforward layer is just a single layer of weights applied to the vectors  .
.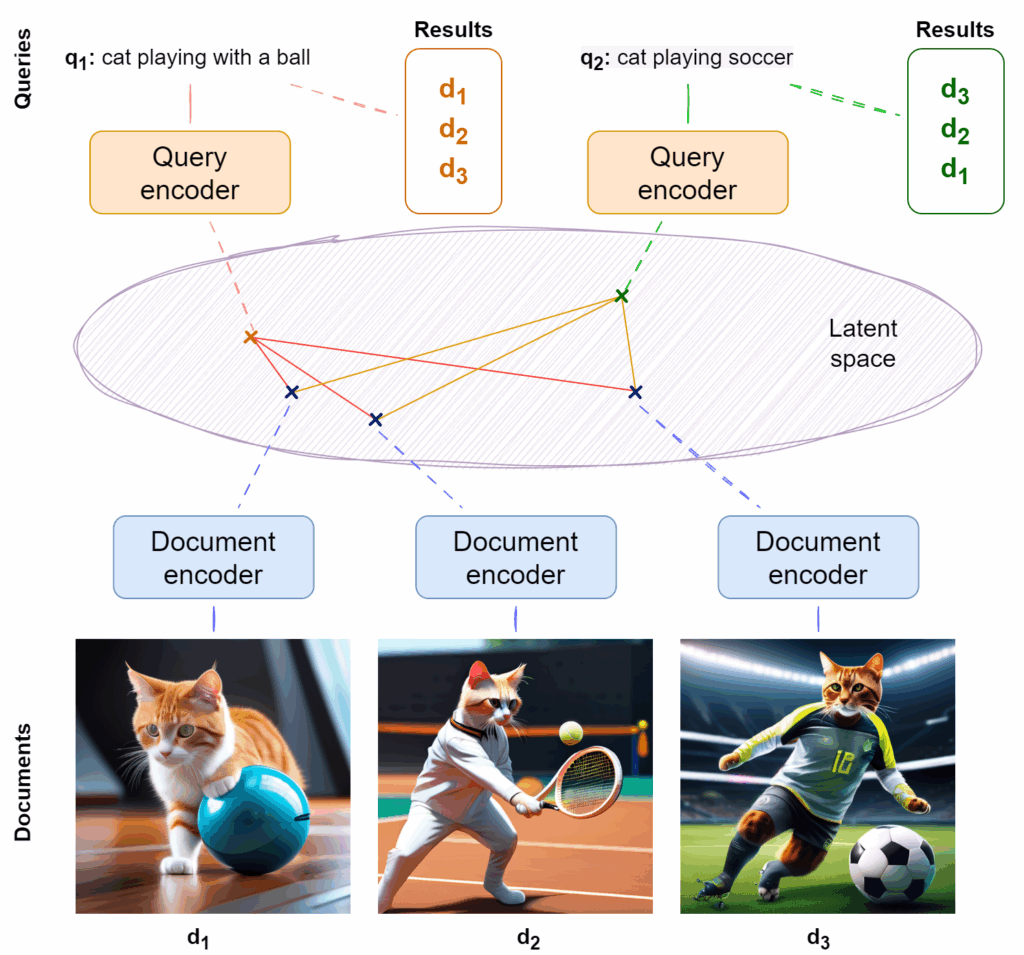
![\[\mathrm{dist}(\mathbf{q},\mathbf{d})=\mathrm{Enc}_q(\mathbf{q})^\top\mathrm{Enc}_d(\mathbf{d}).\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-9f58068832c3fbde1975abde36cc4850_l3.svg "Rendered by QuickLaTeX.com")
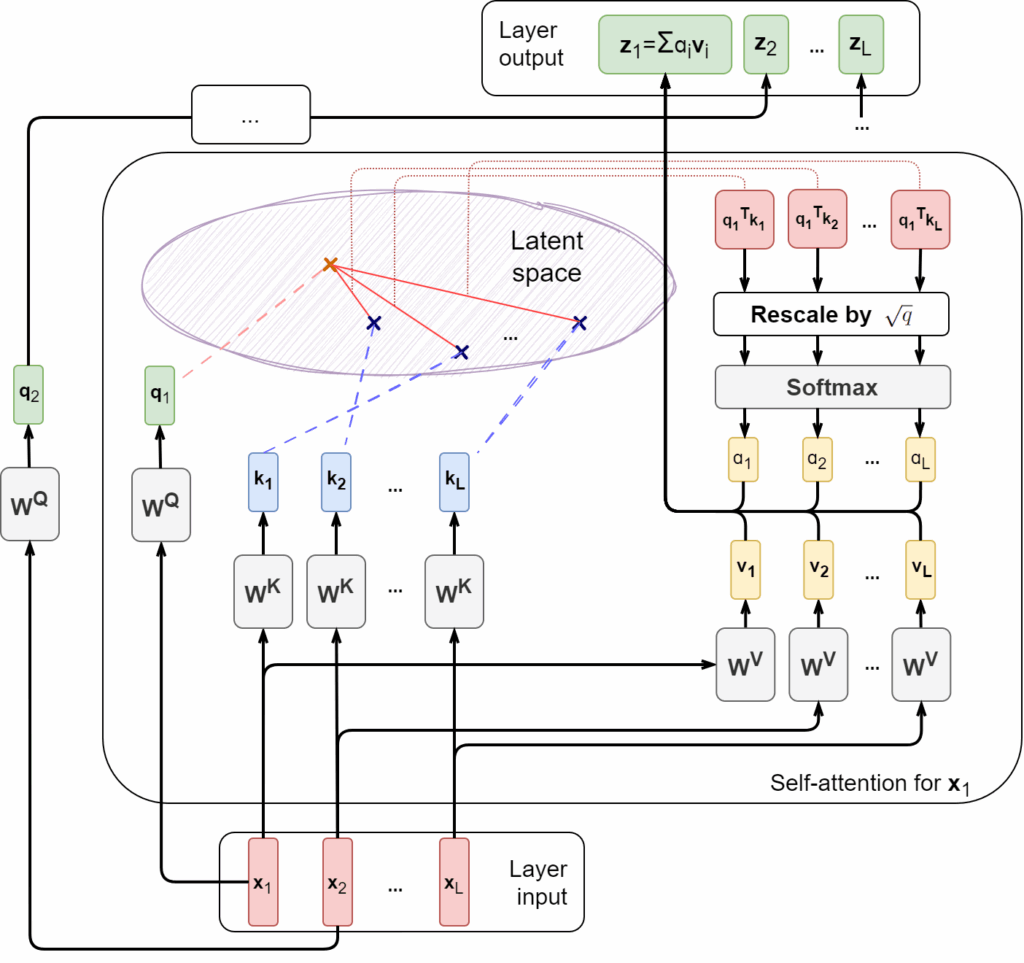
 .
. :
: , we get the query vector
, we get the query vector  ; note that the matrix
; note that the matrix  does not have to be square, and the dimension q of the query vectors,
does not have to be square, and the dimension q of the query vectors,  , may be different from (usually lower than) the input dimension
, may be different from (usually lower than) the input dimension  ;
; , we get the key vectors
, we get the key vectors  for
for  , so
, so  ;
; gets us the value vectors
gets us the value vectors  for
for and
and  ; in practice, however, one usually takes
; in practice, however, one usually takes  .
. from each input vector
from each input vector  transforming into
transforming into  for all different i. Then we need to rescale
for all different i. Then we need to rescale  , and pass the scores through softmax to turn them into probabilities. The self-attention weights are thus
, and pass the scores through softmax to turn them into probabilities. The self-attention weights are thus are all the keys combined in a matrix,
are all the keys combined in a matrix,  .
. . Thus, overall we have the following formula for what
. Thus, overall we have the following formula for what ![\[\mathbf{z}_{i} = \mathrm{softmax}\left(\frac{1}{\sqrt{q}}\mathbf{q}_i\mathbf{K}^\top\right)\mathbf{V},\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-dbdd2c6732e94c1a1738fece92e54fd7_l3.svg "Rendered by QuickLaTeX.com")
 are all the values combined in a matrix,
are all the values combined in a matrix,  .
.![\[\mathbf{Z} = \mathrm{softmax}\left(\frac{1}{\sqrt{q}}\mathbf{Q}\mathbf{K}^\top\right)\mathbf{V}.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-eb7ddb92f78cbeac56a4e77074b8ab57_l3.svg "Rendered by QuickLaTeX.com")
 different heads, using different weight matrices
different heads, using different weight matrices  ,
,  , and
, and  to allow the Transformer layer to consider different combinations of the same input vectors at once.
to allow the Transformer layer to consider different combinations of the same input vectors at once. 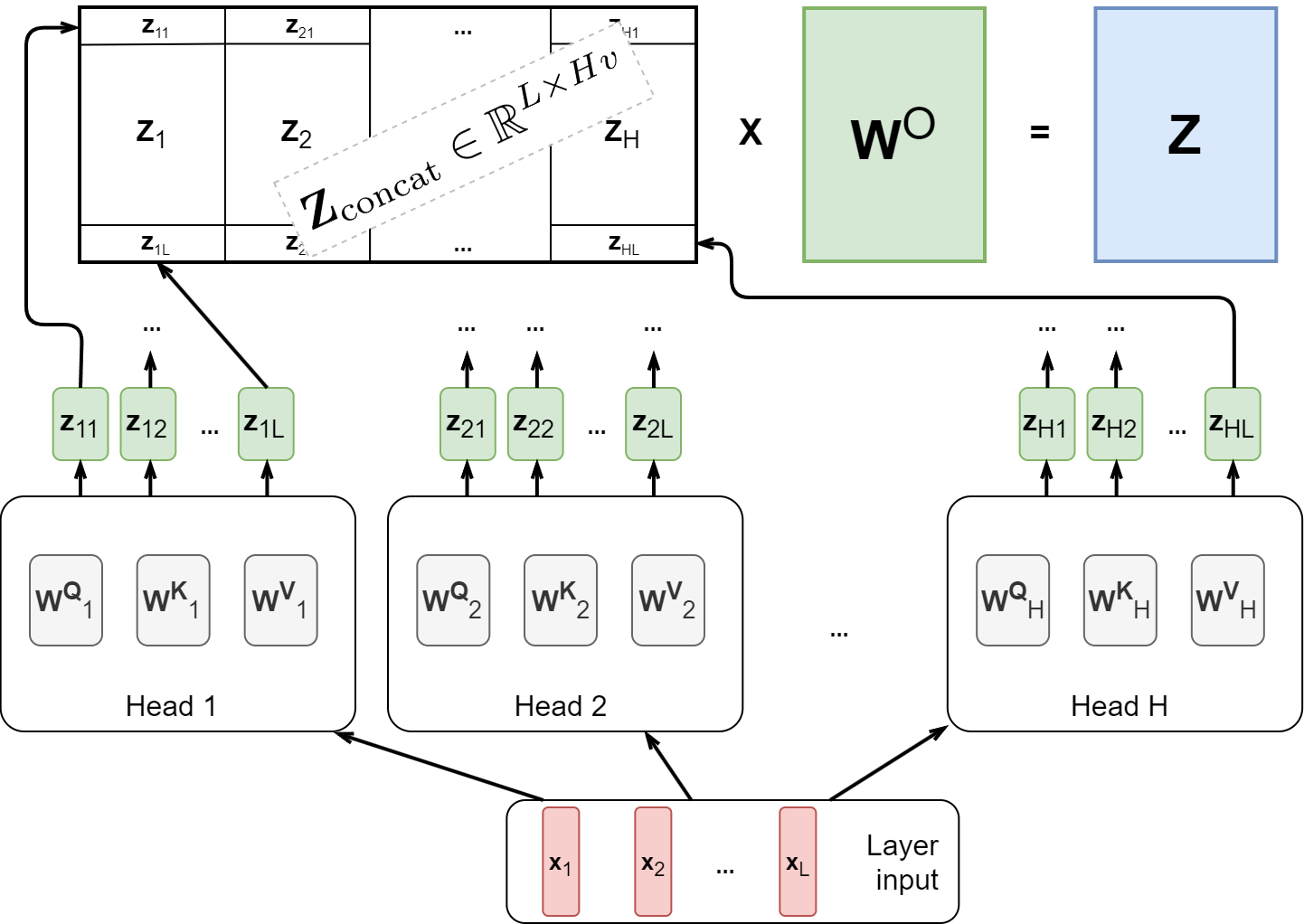
 , each of dimension
, each of dimension  . We need to compress them all into a single output matrix
. We need to compress them all into a single output matrix  with the same dimension as the input matrix
with the same dimension as the input matrix  and then add another weight matrix
and then add another weight matrix  that will bring the result back to the necessary dimension:
that will bring the result back to the necessary dimension:![\[\mathbf{Z}=\left(\mathbf{Z}_{\mathrm{concat}}\mathbf{W}^O\right)^\top.\]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-909bb7c0b997fc5f35fa8435281ebdc8_l3.svg "Rendered by QuickLaTeX.com")
 , we allow the self-attention layer to mix up representations obtained from different attention heads; this is also an important way to add more flexibility and expressiveness to the architecture.
, we allow the self-attention layer to mix up representations obtained from different attention heads; this is also an important way to add more flexibility and expressiveness to the architecture.
 , which is usually done via an embedding layer that’s just basically a large
, which is usually done via an embedding layer that’s just basically a large  matrix that consists of trainable weights. In earlier days of the deep learning revolution in natural language processing, word embeddings were a quite interesting field of study in and of themselves because they used to be trained separately and then just applied as a fixed “dense vocabulary” that neural models trained on top of. This field of study has given us word2vec (
matrix that consists of trainable weights. In earlier days of the deep learning revolution in natural language processing, word embeddings were a quite interesting field of study in and of themselves because they used to be trained separately and then just applied as a fixed “dense vocabulary” that neural models trained on top of. This field of study has given us word2vec (![[0, 1]](https://blog.sergeynikolenko.ru/wp-content/ql-cache/quicklatex.com-04f0a3ab27201a627de6f24cb3c3a480_l3.svg "Rendered by QuickLaTeX.com") , and broke it down into the necessary number of pieces, then the positional encoding would have no idea how many words are actually there between two tokens: the distance from 0 to ½ could be one token or one hundred.
, and broke it down into the necessary number of pieces, then the positional encoding would have no idea how many words are actually there between two tokens: the distance from 0 to ½ could be one token or one hundred.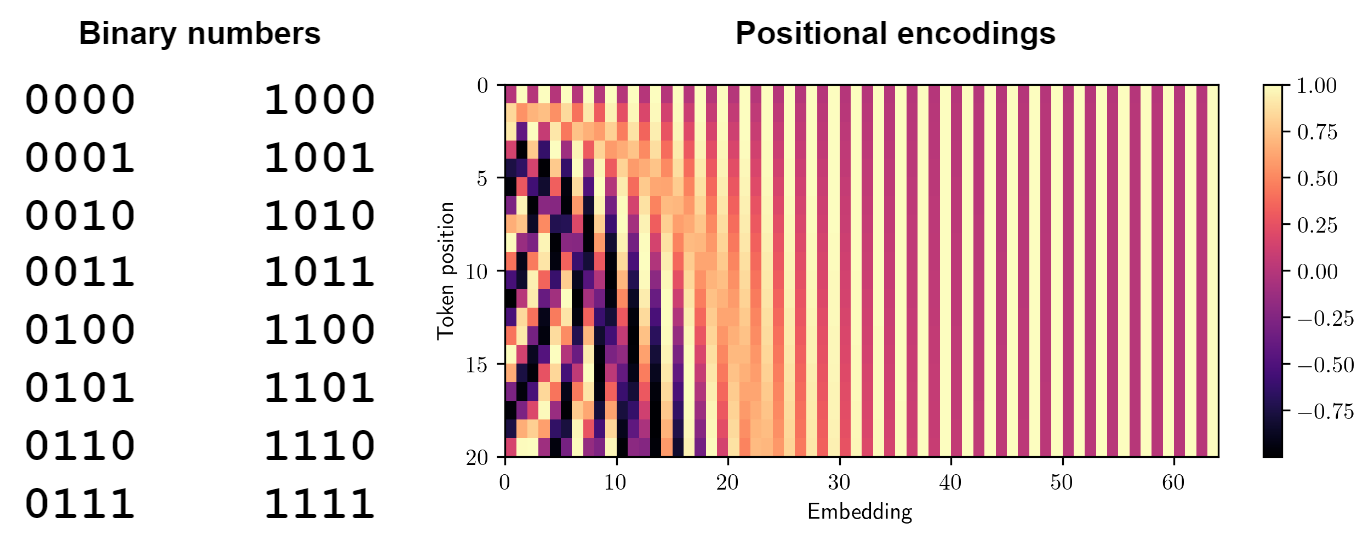

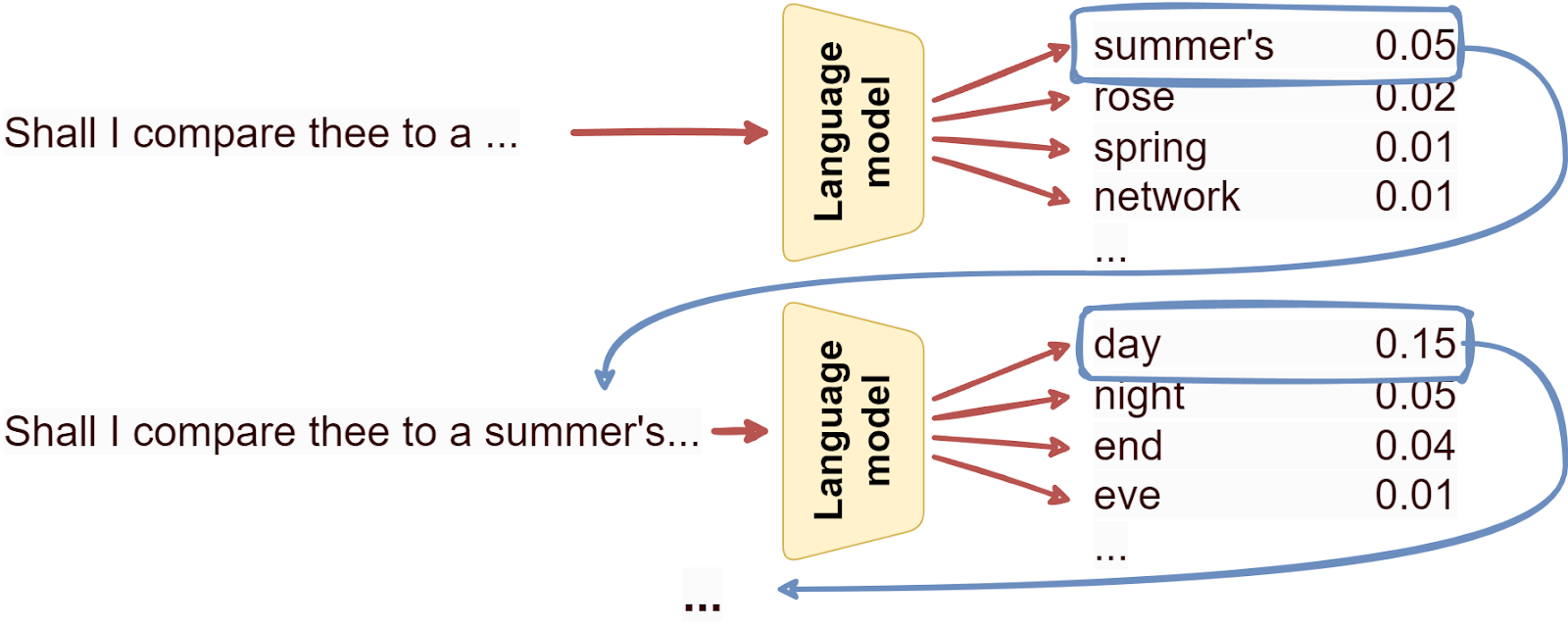
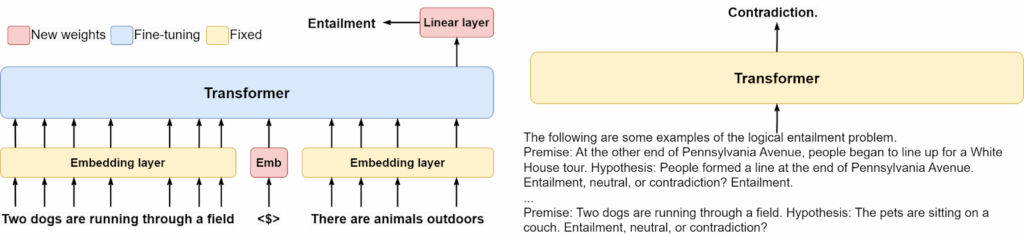
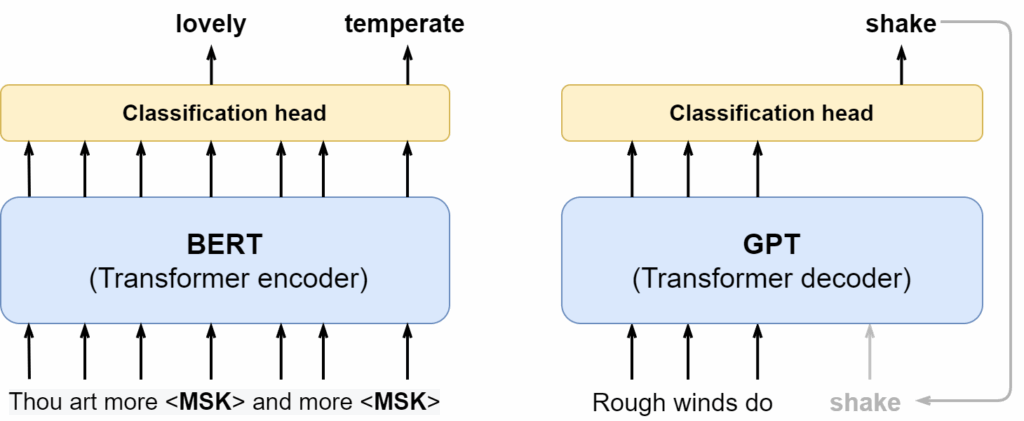
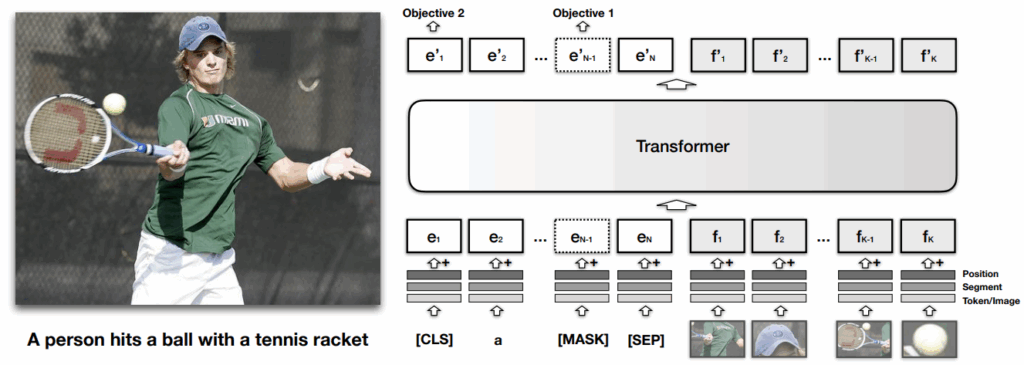
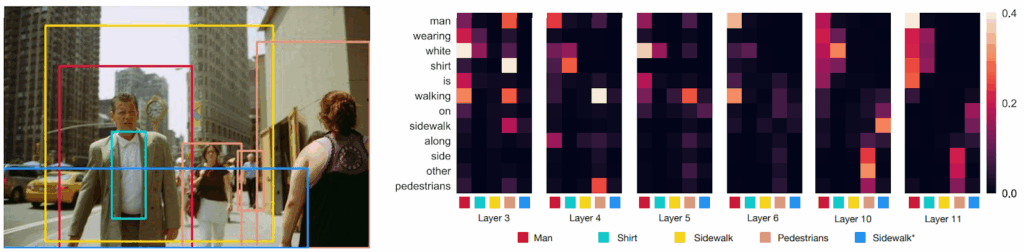
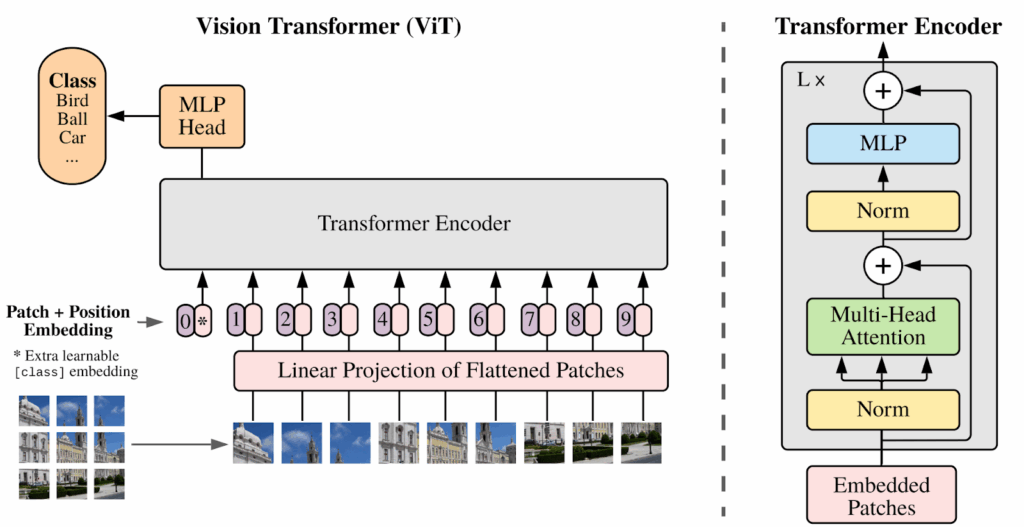
 image with
image with  channels
channels  becomes a sequence of patches
becomes a sequence of patches  , where
, where  is the number of
is the number of  patches that fit into the original image (see the illustration above). The patches are turned into embeddings via a simple linear projection, and then the resulting sequence is fed into a Transformer encoder just like BERT. For pretraining, ViT uses masked patch modeling just like BERT does, replacing half of the input embeddings with the same learnable [mask] embedding and aiming to reconstruct the mean colors of the original patches.
patches that fit into the original image (see the illustration above). The patches are turned into embeddings via a simple linear projection, and then the resulting sequence is fed into a Transformer encoder just like BERT. For pretraining, ViT uses masked patch modeling just like BERT does, replacing half of the input embeddings with the same learnable [mask] embedding and aiming to reconstruct the mean colors of the original patches. pixels, further improving state of the art in image processing problems across the board.
pixels, further improving state of the art in image processing problems across the board.